���M늙C�D���B�m��****���Ʒ���������
���|�� �����h ʷ �(������ͨ��W 710049)
1����
���M늙C�ڹ��I���a�^���Б��÷dz��V���������Ԍ��}�_���̖�D�Q�ɽ�λ�ƻ�ֱ��λ�ƣ��dz��m�������C�M�Д��ֿ��ƣ�������@����đ��úܶ࣬����N���ؙC�����I�z�y�^���и��N�߾��ȶ�λϵ�y�ȡ����ľͲ��M늙C�Ć�Ƭ�C���Ʒ����д��ڵĆ��}�M��ȫ���U��������˺��������㷨�Լ������ٶ���̖Դ�r�ٶ��B�m��****�Ŀ��Ʒ����ͷ���Ӌ�㡣
2���M늙C�Ŀ��ƅ���
���ò��M늙C�����ٶȈ���Ԫ���������\�Еr�������̫����������늙C�G������ֹ̫ͣ�죬���ڑT�����ÿ��ܕ����F�^�_�F�o����ϵ�y�����`����Ը����\�Еrһ����Ҫ���^���ӡ����١������\�С��p�١�ֹͣ�@��һ���������^�̡������Ƶ�һ��Ӌ��C���ܙz�yϵ�y��ʹ�������_���M늙C��x�S�ӣ�y�S�ӡ��ٶ���̖Դ����λ�C����8098��Ƭ�C��ͨ�^�����ͷ����{ԇ�����Y����һ���^��ͨ�õ�늙C���Ƴ�����8098�Ȳ�ram�_��һ�K�惦�^���δ�š�
늙C̖��1��2��3�քe����1#��2#��3#늙C
�����D��0���D��1���D
���ٶȣ������}�_����ma���ĵ�ma���}�_�_ʼ�����\�У�
���ٶȣ������\�Еr������m
�p�ٶȣ��p���}�_����md���ĵ�md���}�_�_ʼ�p���\�У�
��������늙C�\�еĿ�����
�B�m��0-늙C�\����o���Ŀ���������ӛ������ֹͣ����λ��
1-늙C�\����o���Ŀ�������ӛ������ֹͣ����λ���Ա��´����ӕr�����\�У��Ա��Cϵ�y���B�m��λ���ȡ�
�i����λ1:x�S늙C�ϴ��\�нY���r��ͣ������λ��
�i����λ2:y�S늙C�ϴ��\�нY���r��ͣ������λ��
�O���M늙C���������ķ�ʽ�\�У���늙C��ͨ늠�B���Ա�����ʽ�����rom�У�늙Cֹͣ�r�Ԅӌ�������λ�����i����λ1��2̖��Ԫ��ͨ�^���υ����O�ã������Ͽ��������ؿ��Ʋ��M늙C�ĸ��N�\�Р�B��
3���������\�������ĺ��������㷨
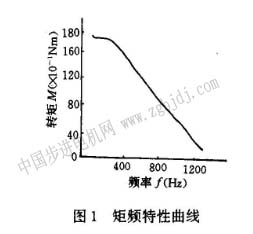
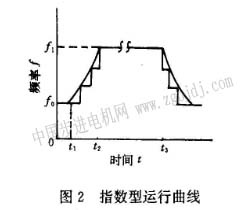
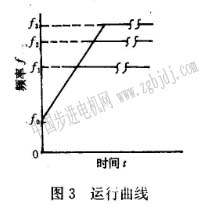
�����υ����У��y�Դ_�����Dz��M늙C�ļ��ٶȺ͜p�ٶȡ�Ӌ��C���Ƶļ����^���ܷ�ɹ���ȡ�Q�ڼ����}�_�����������Ƿ���m�����M늙C�ļ��ٶ��cʧ���D���������P�����������īI1��2�����M늙C�ľ��l����������D1��ʾ�����@�N���l���Է����������@�N���Ե����������Dz���׃���ٶȣ���ָ�����\��������D2��ʾ���@�N�������^���ϲ��M늙C�Ӝp���^�̵��\��Ҏ�ɣ��ܳ�����ò��M늙C����Ч�D�أ�����푑��Ժá��īI1��2���o���ī@�������م����ķ����������ķ����������Ȱ��\��������ξ��Ի���Ӌ������ٶȼ������������م������У��Ա�����ʽ��ţ���늙C��ͬ�ٶȕr�քe�{�á��@�N�����ڄ��ٶȿ������׃�r�͟o���M��Ҫ���ˣ���鲻�����A�ȴ惦̫��ı����{�ã������Ʊ��ܷ�����������һ�N�چ�Ƭ�C�ό��Fʮ�ֺ�����ֽ���****�����^�̵Č��F������
늙C�ڵ��ٕr(fo<l000hz)��ֱ�����ӣ���ͬ��늙Cfo��Щ��e��ȡfo=500hz���ң����ٷ����ǣ��O���M늙C�����\�Еr�������}�_�g���ӕr�r�g������co����n������ʹ늙C�����������^�̣���ôȡ�r�g��������
cn,g- n,g-n- (n - l),����c0+10,c0+6,co+3,c0+l,(nһ1,2,��n)ʽ��c n-cn-1=n��n=l��2������n
�@�����Џ�co�_ʼ���������֮�����Ξ飺1��2��3������n����һ��������헲��f�����У����y�ó���
��������һ����׃�����\���^�̣�ÿ�����ٶȰ�1��2��3������n�������ӕr��λ�f������׃���ٶȵ���1�������ӕr��λ��n���x��ˣ�M��ėl���ǣ�늙C��cn���}�_�g���ӕr�r�g�������ӕr��fo |