�в��ͳ���늄әC׃�l����ϵ�y4
���L�� ʷ���� ���У�㽭��W ���� 310027��
1����
�в��ͳ���늄әC��һ�N������늙C�����ǿ����ӭh������ճ�N�ĉ���մ���������Ӷ��ӭhһ����ӣ���ͨ�^�����D��֮�g��Ħ�������D�����D�������@�N늄әC�������Ҫ���茦����մ�ʩ�Ӄ���늉���Чֵ��ȡ��l����ͬ����λ���90����늽Ƕȣ������Ҳ�����늡��ɉ���մɵ��扺�Ч����ÿһ�ཻ��늷քe�ډ���w�Ϯa��һ������v�������v���ڕr�g�����90����늽Ƕȣ������g�����1/4���L���M���ϳɞ�һ������в������Ӷ��ӭhһ����ӡ��������ý� ��늵��l���ڳ����l�Σ���˱��Q�鳬��늄әC��
2��һ����ϵ�y�Ę���
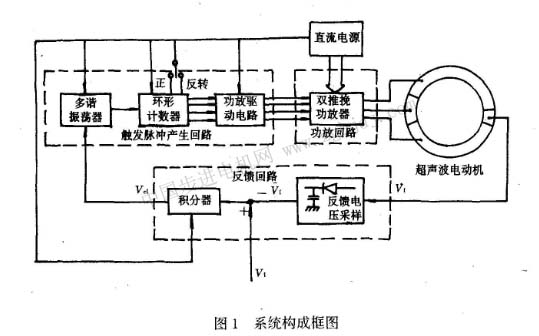
�в��ͳ���늄әC��һ����ϵ�y�ⲿݔ���l2v��ֱ��늣�ݔ������ཻ��늣���ϵ�y���ԣ�회�ݔ���ֱ����D׃�ɽ���늣���ˣ��Ɍ��俴����һ����׃���������@�N늙C��һ���Ч�·�������·���Ɍ�������̖�еĸߴ��C���V�����ɞ����Ҳ����@�ӣ�ֻҪ��ϵ�y�ܮa������늉���Чֵ��ȡ��l����ͬ����λ���90�ȣ�늽Ƕȣ��ķ�������늼��ɣ��Ķ�ʹ�·�õ��������D1��ϵ�y���ɿ�D��
2.1���Ų���
���Ų��ֲ��Ãɂ���ͬ������Ŵ�������D2a��ʾ������t1��t2�x�Ãɂ�ͬ�O�Ծ��w�ܣ�����ݔ����̖����Ƿ�����̖�ſɼӵ��������ԵĻ��O�ϡ��·��ݔ������ݔ��׃�����cؓ�d����ϣ���׃ݔ��׃�������є��ȿ�ʹؓ�d�ɞ�Ŵ���Ҫ���****ؓ�d���Ա��C���w�ܹ�����****�\�à�B������Ŵ��·�r�ɂ����a���w�ܣ���һ����̖���ڃ�݆����ͨ�낀���ڣ���ͨ�Ǟ�С�
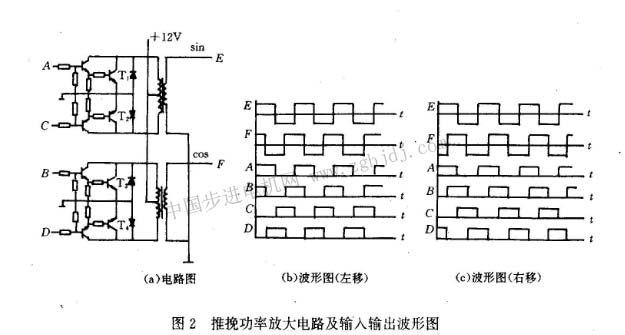
2.2���ήa�����b���·
�����ɹ��ʷŴ��·ݔ����e��f���c�IJ�������a��b��c��d���c�IJ��Ρ����˷��㣬��������ϵ�y���d�r���c�IJ��Σ��˕re��f�c�IJ��ηքe������ֵ��ȡ���λ���90�ȵķ��������Oe�c���Μ�����f�c����a��b�c�a����늉��r��e��f�cҲ����늉����t��a��b:c��d���c�ĕr��D����D2b��ʾ���������c���Σ����Կ���a���١�c��d���c�đB����һ���r�g���ڃ���ɏ�a��d�Ĕ�����������^�̣�
ͬ������e�c���γ�ǰ��f�c��a��b��c��d���c�ĕr����D2c��ʾ���˕ra��b��c��d���c�đB����һ���r�g���ڃ���ɏ�a��d�Ĕ�����������^�̣�
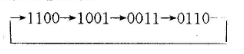
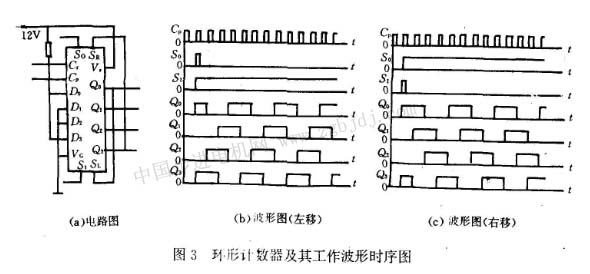
Ҫ��ɏ�a��d�Ĕ���ѭ�h�������^�̣�ֻ��һ���h��Ӌ�������ɣ����@���x���˼���оƬcd40194����D3a��ʾ�����h��Ӌ�������|�l��ݔ��һ���}�_���tݔ�����Ă����_qo��q1��q2��q3�Ġ�B��һ��׃��һ�Σ����������90�ȣ����Ԅӵؾ������b��Ĺ��ܣ�ݔ�����ηքe�ca��b��c��d���c�IJ���һ�ӣ���D3b��c��ʾ�����ɈD�п�֪���o�h��Ӌ�������l�ʞ�ݔ��늉��l�ʵ�4�����h��Ӌ����ݔ���˵Ĕ����������^�����÷քe�����ڳ���늙C���������D���M���ˌ�늙C�����D��Ҫ��
2.3���{���l�ʮa���·��
���ڌ�늄әC��׃��Ҫ���ʹ����늄әC����һ����ϵ�y�߂���Ը�׃���ӭh����Ĺ��ܣ��@����ͨ�^��׃ݔ��늙C�ă��ཻ��늵��l�ʁ���׃���ӭh����׃�l�{����
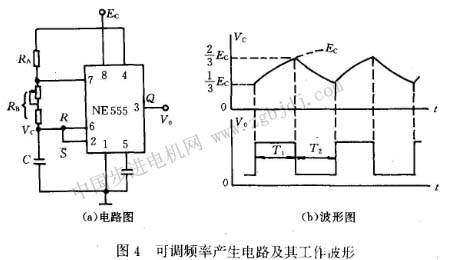
���{���l�ʮa���·������ne555���r���������ɵĿ��{���C��ʎ���M�ɣ���D4a��ʾ���乤��ԭ�����£�
a����ͨ�Դ˲�g����݁�������늣��˕r���Ɍ�ne555���ɉK������һ��rs�|�l����r=s=o.q=i��ݔ��v������ƽ����һ���棬q=o,���·�늹ܽ�ֹ������_ʼ��늣��M����һ��B��
b�����c��늣���ָ��Ҏ��������څ��ec��ֵ��ݔ��늉������ڸ��ƽ��
c.�������늉�vc������2/3ec�r��ʹݔ��늉�v������ƽ��
|