һ�N�·f��λ�ýǙz�y�·
�S�A �fɽ�� ���❍ ���A��������W��h430074��
1����
���ŷ�늙C����ϵ�y�У������ܵ��D��λ�Ùz�y�b��һ��ֹ��ʽ��늴ŸБ�ʽ�ɷN�������ʽ�ַ�����ʽ��늾��a����****ʽ��늾��a���������ă��c���ܺ��εؙz�y��λ�ã���ȱ�c��������늚�����Ӱ푣������韩������늴ŸБ�ԭ�������D׃���������º��Q��׃������һ�Nģ�Mʽ�y��Ԫ�����нY�����ΈԹ̵ă��c���������z�y�����ŷ���֮�g���͵���̖�ǵ��l���Ҳ������Բ���������Ӱ푡��S�����ֻ��z�y�����IJ�ͬ��λ�÷ֱ���Ҳ����׃����һ��Ĝy���·���H��̎��һ��λ�ýǣ��҂����Ƴ����@�N�y���·�����H�Y�����Σ����ȸߣ����ҿ���ͬ�r�z�y����λ�ýǣ�ԓ�·�ѳɹ����������Ƴ���һ�������ɶ��ŷ�늄әC����ϵ�y�С�
2��׃�ij��ù�����ʽ��ԭ��
2.1���ù�����ʽ
��ϵ�y�У����Բ��ÿ��g�����ă���ֶ��@�M���ţ��Ɇ����B�m�@�Mݔ����̖��Ҳ���Բ��Æ����B�m�@�M���ţ��������ă���ֶ��@�Mݔ����̖�����ՙCеλ��׃�Q��늉���ֵ��ʽ����λ��ʽ�IJ�ͬ���ֿ��Է֞��b�����b���ɷN�\�з�ʽ������늉�������IJ��ο��������Ҳ���Ҳ�����Ǿ��β����{��ʽ���о��ȸߣ����ɔ_�Ժõă��ݣ����Y���^���s���ɱ��ߣ���˲����b�ʽ��2.2���༤���b���\�з�ʽ��ԭ��
�O�����@�M����늉���ua��ub���䌦�����@�M****��朣������@�M�Б�늄ݞ飺
ʽ�Ц�������@�M�ca���@�M���w���ľ��ĊA�ǣ��؞鼤��늉����l�ʣ����ڦ���׃�������������l�ʺ�С�����d��/dt=0��
�������Ҳ���ŕr��ȡua=umcos��t��ub=umsin��t�t
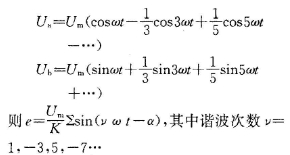
���˺����Դ��Ҳ�ɲ��þ��β���ţ��ø����~������ʾ�Ą��늉��飺
���Կ������C��늄ݷ�ֵ�c����늄�һ�Ӵ�С����ˣ�����M����Ч�ĞV�����Vȥ�C���������M���b�࣬ȡ���c���Ҳ����ͬ�ӵ�Ч����
3ͬ�r�z�y�����ǵ��·
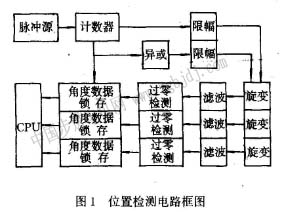
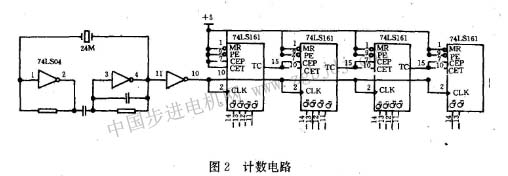
�@�N�z�y�·���þ��β���ţ���������H����ʡȥ�a�����������������Ҳ����韩������߀�ɱ��C����λ�ýǙz�y��ͬ���ԣ�ԓ�·��D��D1��ʾ��
Ӌ�������ֲ�����4Ƭͬ��2�M��Ӌ����74ls161��ʹ��Փ���ȿ��_16λ�������]��ˢ�r�g�����ƣ�ֻ�����е�14λ��������74ls161�Ѓɂ�ʹ�ܶ�t��p�����ڃH��t��p��4λ����λ����1�r���Mλݔ��c�Ş�1����ˣ��Ɍ�t��pֱ���B���ϼ����Mλݔ����c�ϣ���D2��ʾ��
����ͬ��Ӌ�����и����|�l����ͬһ���}�_Դ�M���|�l��ʹ�|�l����B퍸�׃�c****���}�_Դͬ������������ˮ���Ӌ�������ܮa����ë���`�ͬ�r�ֿ��Ա��C����λ�ýǙz�y��ͬ���ԡ�
Ӌ����****2λ����̖����֮�a���c****λ����90�ȵķ������@��·�����cһ�̶����ƽ���^���a��������ؓ��ֵ�ľ��β������^����ֱ����������̖��
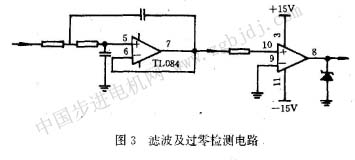
�V�������ð�����˹( butterworth)���A��ͨ�V�������������c���l�����D���l��֮ǰ����̖����ԭ��ͨ�^�V��������������̖�t��-40db/10���l�ķ���˥�p�����⣬��ͨ�V�������������x��Ҫ�ߣ��@�ӱ����˲��Î�ͨ�V������δ�ą����x������y��
�V����a���Ę˜����Ҳ�ͨ�^�^��z�y�·����б�ʞ������^���c̎�a�����S׃������λ�ý��i����̖�����Ã�Ƭ74ls374�����i��ȫ���������V�������^��z�y�·��D3��ʾ��
����λ�ýǔ���ȫ����Ӳ���a������� �Ĝy���ӳ������£�ܛ�������ஔ���Σ�����8098�R���Z�Ծ���
|