��ֱ��늙C�������OӋ
���v�� �� �� �� ���������I���I��W�C�������150001��
��ժ Ҫ������lmd18200���ʼ����·�OӋֱ��늙C������ݔ�����2a��ݔ��늉�30v�������w�e�H��110mm��72mm��30mm������ӑ�������������ăɷN��ʽ�����o�����F�@Щ��ʽ���·�OӋ��
���� �~��ֱ��늄әC���·�\�ӿ��Ƽ����·
l �� ��
��һЩС�͙C�һ�w���O���У�Ҫ��늙C�������^С���w�e�������ṩ�^��������늉�ݔ�����������һ�N����lmd18200���ʼ��������OӋ��pwmֱ��늙C���������~��ݔ������_��2a���~��ݔ��늉�30v��pwm�_�P�l��25khz������ttl�ƽ��pwm�}�_�c������̖���sv�����ȵ�ֱ��늉�����늙C�D�٣����w�e�H�飺110mm��72mm��30mm���m���Ӷ�N��͵�С��ֱ���ŷ�늙C���Ԙ����ŷ�ϵ�y���{��ϵ�y��
2 lmd18200���ܺ���
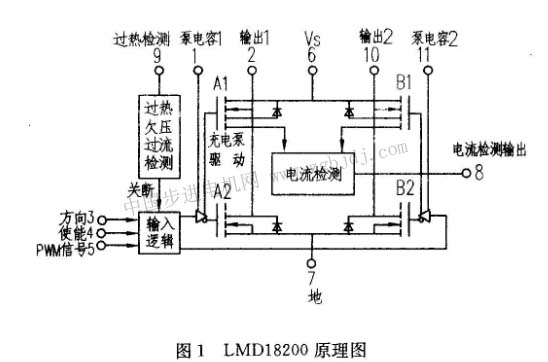
lmd18200����ԭ������DҊ�D1�����������Ұ댧�w��˾���a������늙C�ӵĹ��ʼ���оƬ������4��dmos�ܘ��ɵ�h�������߉�·��������1��11�_��t-220���b�У��书�����£�
(1)�~�����3a����ֵ���6a��
(2)�Դ늉�55v��
(3)���ʾ��w�܌�ͨ���rds��0.3�ء�
(4)ttl��cmos���ݵĿ�����̖ݔ�롣
(5)�Ⱥ�����ۆ�ֱͨ�·��
(6)оƬ�^���ݔ�����Ԅ��P�ࡣ
�D2a���p�O�Թ�����ʽ�����@�N������ʽ�У�����pwm��̖����lmd18200��dir���ӣ���pwm��̖��ռ�ձȴ�С����늙C���D����D�٣���ռ�ձȞ�ٷ�֮50�r��uab늉���ƽ��ֵ���㣬늙C�oֹ����ռ�ձȞ�ٷ�֮75�r��uabƽ��ֵ�����㣬늙C���D����ռ�ձȞ�ٷ�֮25�r��uab��ƽ��ֵС���㣬늙C���D��
�D2b��ΘO�Թ�����ʽ�����@�N������ʽ�У�pwm�}�_��̖����lmd18200��pwm�ˣ���������̖����dir�ˣ�pwm���}�_��̖��ռ�ձțQ��늙C�D�٣���dir��(7)�Ȳ��ij�늱��·�ṩ��·�ϱۃɹܵĖŘO늉���
3 �ɷN���Ʒ�ʽ
lmd18200�ṩ�p�O�Է�ʽ��Ҳ�Q�����i�����ƣ��͆ΘO�Է�ʽ��Ҳ�Q�����}�����ƣ��ɷN������ʽ���D2���@�ɷN������ʽ���_�P�Ľ�ͨ��r������IJ��ΈD�����ƽ�ߵ͛Q��늙C�D��
4�����·�OӋ
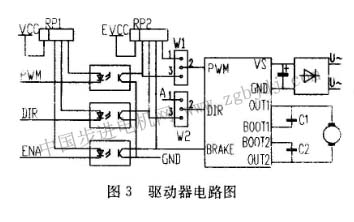
�D3�����OӋ���Ӈ��·ԭ��D�����OӋ�����������ׂ����c��
(1)���m����ͬ�Ŀ�����̖���ɳ������lmd18200�ṩ�ăɷN������ʽ��������������ṩpwm��dir��̖���tʹ���������چΘO�Է�ʽ���@�Ә��ɵ�ϵ�y��ȫ����ʽ��������ģ�M늉��Ĝ�Ư�����ɔ_�Ȳ���Ӱ푣�����������H���ṩֱ��늉���̖���t�����Ќ����D�Q��pwm��̖��ʹ�����������p�O�Է�ʽ���ɷN������ʽ������������w1��w0�����x��wl��w0��2��3�����B�r�����������چΘO�Է�ʽ��1��2�����B�r�������p�O�Է�ʽ���˕r��a���Ӟ�һ�ɈD4�·�a����pwm��̖��
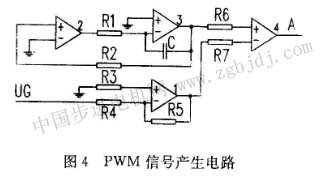
(2)��һ�����\������lf347���Fģ�M늉���pwm��̖���D�Q��ԔҊ�D4��
�D4���\��Ŵ���2��3�������Dz��l�������o���ġ�5v��ֱ��늉�v�����Ŵ����Ŵ���c���Dz����^���\��Ŵ���4���F���Dz���pwm�������D�Q��pwm��̖���l�������c�Q��v���ķ�ֵ�͘O�Բ�ͬ���ڱ��^��ݔ���ˮa��ռ�ձȲ�ͬ�ķ�����
(3)�����������چΘO�Է�ʽ�r���������������������ɸɔ_����pwm��dir��ʹ�ܶ�ena�������˹�������������x������Ķ��O��һ���ÿ������ṩ��5v늉������O�܂���һ��dc-dc׃�Q���ṩ�Դ늉���
|