�oλ�Ùz�y���oˢֱ��늙C�Ԍ�****�c�ГQ��
���x (���A��W����100084)
������ ���������I��W��
��ժ Ҫ�����һ�N�·f���Ԍ�****�c�ГQ������Q�˷�늄ݓQ���\�еğoλ�Ùz�y���oˢֱ��늙C�����д��ڵ������Ӷ���ͬ���\�е���늄ݓQ����ͬ���\�е��ГQ�^������ʧ���Ć��}���ɹ��ذ����\�������ƵĘәC�С�
���� �~�����Ԍ�****�c�ГQ�����oλ�Ùz�y���oˢֱ��늄әC���ГQ
1 �� ��
��늄ݓQ���\�еğoˢֱ��늙C����lչ�ܿ죬���S���@���ˏV���đ��á����늙C�\�п�����һֱ����һ������Q�Ć��}�����a�����@�N늙C���е��\���^�̡�
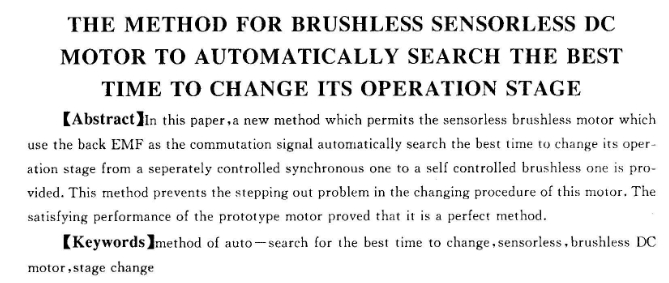
���ڷ�늄ݓQ���\�е�늙C���������������@�M�еĸБ�늄��c�D��λ���д_���Pϵ�@һԭ��������[1]���Б�늄ݵķ�ֵ�c늙C�D�ٳ����ȡ���늙C�oֹ���D���^�͕r����늄ݞ�����^�����o�����z�y�����Դ_���D�ӴŘO�Ŀ��gλ�ã�Ҳ�Ͳ������ڷ�늄ݓQ�����@�r����Ҫ�˞�ؽo늙Cʩ���ɵ��l�����l������ٵ���ͬ���ГQ��̖��ʹ늙C����ͬ����ʽ���oֹ�����D�ӡ�
��늙C��늄ӄ��S���D�ٵ������_��һ��ֵ�r��ͨ�^��늉��z�y�ѽ��܉�_֪늙C�D�ӵ�λ�á��@�r��ͨ�^Ӌ��C��늙C����ͬ���\�з�ʽ�D�Q��oˢ늙C����ͬ���\���fʽ��
늙C����ͬ��׃�l�����\�з�ʽ����ͬ���\�з�ʽ�g��һ�D�Q�^�̡������@�N늙Cһ����һ׃�l��ʎ���a��׃�l����ͬ���ГQ�}�_���Զ��r�����·����늙C����ͬ���\�Р�B�ГQ����ͬ���_�h���]�h�\�Р�B��Ҳ�����f���ГQ��ʽ���Ǯ�늙C�D���_��ijһ�ٶȕr��Ӳ���·�P����ͬ����̖�������D�뷴늄ӄݿ����\���A�Ρ����īI2��3�е�늙C���Dz����@�N��ʽ�M���ГQ��
Ȼ��������늄ݿ��ƵēQ����̖�cӋ��C�a������ͬ������̖�g��λ����^��r���@һ�ГQ�^�͕̾����F���}������늙Cʧ�����M��ͣ�D��Ŀǰ���Ȳ��õĽ�Q�k���ж���
(1)ͨ�^����{ԇ�_��늙C****�ГQ�ٶȡ�
(2)�����S�౻��늙C�D�ӑT���^��һ����ʧ��Ӱ푲�����T��ʹ늙C�Կ�������\����ȥ��
�@Щ��Q�k�����܉�_�е�������ͬ������ͬ�����ГQ�c�����ٴַ��Կ��Ʒ�������ʹ�ܱ���ʧ����Ҳ��Ȼ�������ГQ�r늙C�D�غ�С�����ܸɔ_�������@�N������Ҫ��Μy�������������صĹ�������
2 �Ԍ�****�c�ГQ��
2.1��������
ᘌ���늄ݓQ���\�еğoλ�Ùz�y���oˢֱ��늙C�д��ڵ��@һ���}������ʹ늙C�ГQ�r��������ͬ����̖�c��ͬ����̖�g��λ����^�������ʧ���F��l�����_���ГQ˲�g�D�ز����^С���y�Կ�ؓ�d�_�ӣ��M���p���{ԇ�����������һ�N���ص��Ԍ�****�c�ГQ����
�@һ�����đ��û��A��늙C�\���^�̑�ȫ����ܛ�����ơ��P��������һ�_�����t�����@�ğoλ�Ùz�y���oˢֱ��늙Cϵ�y��ԓϵ�y��8098��Ƭ�C����ģ��o�Ա�Ҫ��늙C�����ӡ���늄ݙz�y���^�����o���·����******��Ӳ�������ԓ늙Cȫ������ָ��Ҫ��늙C�����\���^�̵Ŀ��ƾ���ܛ����ɡ����ӵ�������ͬ��׃�l������̖��Ӌ��C����һ�ӕr�����ṩ����늄���ͬ���\���^���У����κ�ķ�늄��^����̖���x�롢̎������늄ݓQ����̖�Įa����ݔ����Ӌ��C��һ�����㷨���F����ȫ���ֿ��ƵĻ��A�ϣ��ɹ��،��F���Ԍ�****�c�ГQ���������C��늙C�ГQ�^�̵������ɣ���ǧ�����ό����C����δ���Fʧ���F��
2.2��늄ݓQ��Č��F
��늄ݿ��ƵēQ����̖�a��ԭ�������Ƶ�ϵ�y��늙C�����^С���ʲ���һ����ͨ������������B�İ���ӷ�ʽ����늄���̖�������@�M�˲�ȡ�������։����V�������Ρ����x���ͽo8098��Ƭ�C��8098������늄��^����̖���t30�������������؛Q��������ͨ�������������@�M�_ͨ��̖�ͳ��������·���������@�M��늣��Ķ����F��늄ݓQ�����෴늄���̖�c�������@ͨ��̖�g�Pϵ��D1��ʾ��
���چ��࣬�@�M��������Ҋ�D2��
|