��늙C���x�õ����v�����ǙC���x��
�촺�� �������������I���I��W150001��
1����
�����ǙC��һ�N���D��׃�Q��늉���̖����늉���̖׃�Q���D�ǣ�ͨ�^�ɂ���ɂ����ϵĽM��ʹ�ã��Ԍ��F�ǶȵĂ�ݔ��׃�Q�ͽ��յ�Ԫ����
�ڬF�����g�I��ĸ������T�У������ǙC�V���������Ԅӿ��Ƶȷ��档�ɰ��������ǙC�ڃ����M�ɵ�ͬ����ϵ�y������늵�ϵ��ʹ�h���x�ăɸ������Cе�D�S�܉_�ر�����ͬ���D��׃��������ͬ�����D�����F�Ƕ�λ�õ��h���x��ݔ��׃�Q��ָʾ��
2��������ԭ��
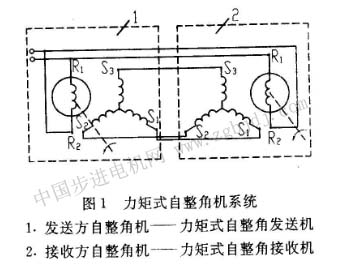
�����ǙC�����\�з�ʽ��ͬ���֞�����ʽ�����ǙC�Ϳ���ʽ�����ǙC��������ʽϵ�y�У����շ��Cе�S��λ�õĸ��S�D�����������ǙC�����a�������،��F�ģ�Ҋ�D1��
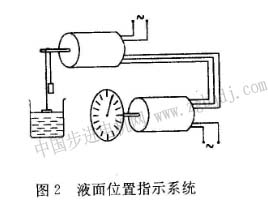
�l�ͷ��������ǙC�Q������ʽ�����ǰl�͙C�������շ��������ǙC�Q������ʽ�����ǽ��ՙC���l�͙C�ͽ��ՙC��ԭ�˞�����@�M���ɽ����Դ��늼��ţ�ؓ�˞������@�M�����c���λ����ӡ����l�͙C�D��ƫ�Dijһ�Ƕȕr���䶨���@�Mݔ��һ��������늉���ʹ���ՙC���D����ͬһ����ƫ�Dͬһ�Ƕȡ����l�͙C���D����ijһ�ٶ����D�r������軵��D��Ҳ��ͬһ�ٶȸ��S���D��ʹ���ߵ��D�S�f�{�������@�Nͬ����ϵ�yͨ���Á��M���h���x����̖��ݔ��ָʾ�����h���xָʾҺ��߶ȡ��y�T�_�ȡ���ݡ��V�������߶ȵȡ��D2��ָʾҺ��λ�õ�ʾ��D�������SҺ���������½���ͨ�^�K�����������ǰl�͙C�D���D�ӣ������ǽ��ՙC���D�ӱ������ָ��S֮�D�ӣ��ʴ_ָ��Һ��ߵ͡�
�����@һϵ�y�е������ǙC���������ݔ�������أ����D�أ�����ؓ�d���D2��ָᘣ������ģ��ʷQ������ʽ�����ǙC�����������������ģ�ֻ�m�ڽ��ՙC�S��ؓ�d���p�����ҽǶȂ�ݔ����Ҫ���ֲ��ܸߵĿ���ϵ�y�С�����ʽ������ϵ�y���_�h����ϵ�y��
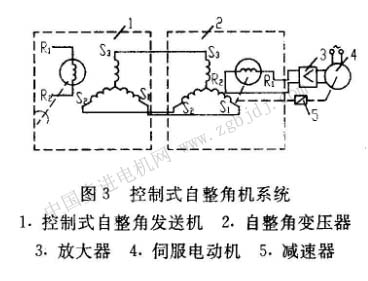
�ڿ���ʽϵ�y�У����շ��ęCе�S��λ�õĸ��S�D�����ɽ���ϵ�y�е��ŷ�늄әC���F�ġ��D3���@�Nϵ�y��ԭ��D���c����ʽ�����ǙC��ͬ���������ǽ��ՙC����ֱ�ӎ�ؓ�d�D�ӣ��D���@�M���ӽ���늉������l�͙C���D��ƫ�D�����D�r�����ՙC���D���@�M�͕��a��늄ӄݣ�ݔ��һ����С��늉����@�����̖ݔ���o�Ŵ������Ŵ��������ŷ�늙C�������@�M���Դ���ŷ�늙C���D�����ӽ��շ������ǙC�D�Sؓ�d��ֱ���_���l�ͷ�ͬ�ӵ�λ�á�
�����@һϵ�y�е������ǙC���������ݔ����늉����ƈ���늄әC�ģ��ʷQ�����ʽ�����ǙC�������еĽ��ՙC�ǏĶ����@�Mݔ��늉������D���@�Mݔ��늉���������׃������B���ʷQ��������׃������
���ÿ���ʽ�����ǙC���ŷ��C���M�ɵ��S��ϵ�y������ؓ�d����ȡ�Q��ϵ�y���ŷ��C�������������^���ؓ�d�����ң�����ʽ�����ǙC�M�ɵ��]�hϵ�y���ȸߡ�
3 ��Ҫ���g����
3.1����ʽ�����ǙC����Ҫ���g����
3.1.1 ����������
����ָʧ�{�Ǟ�1���r�l�͙C�ͽ��ՙC�S�ϵ�ݔ���D�أ��������D���������ǽ��ՙCһ���Ҫ������ָ�ˣ���ֱ��Ӱ�����ʽ������ϵ�y���`���ȣ�һ��aƷ�����о��г����Ĕ�ֵ��
3.1.2��λ�`��
������ʽ�����ǰl�͙C�У����D�ӄ�źl�͙C�D�ӏĻ���늚���λ�_ʼ��ÿ�D�^60�ȣ������Ѓɸ�ݔ����֮�g�Ŀ��d늉������㣬��λ�÷Q����Փ늚���λ�������OӋ�c��ˇ�ϵIJ��M���ƣ����H늚���λ�c��Փ늚���λ�������������֮��Q������ʽ�����ǙC����λ�`��ýǷ֞��λ�����T�����۷e�`�����ʽ��ʾ����ȡ���c��λ�`������ؓ****�`��****ֵ֮�͵�һ�벢���ԡ�+����ʾ�����Ĵ�С�Q���l�͙C�ľ��ȡ�
3.1.3�o�B�`��
������ʽ�����ǽ��ՙC�У�����ϵ�y���Fʧ�{�Ƕ�ʹ���ՙC�D���S�l�͙C���D��Ҳƫ�Dͬ�ӵĽǶȣ������ʧ�{�Ǟ����λ�á������H�ϣ������ՙC�D��̎�څf�{λ�Õr�����ڽ��ՙC���D�S�ϴ���Ħ���D�أ����ԣ����ՙC�c�l�͙C�D��֮�g�������D�Dz�@���D�Dz�����o�B�`��ԽǷ֞��λ�� |