���Ŕ[��(d��ng)늙C(j��)�ŷ�ϵ�y(t��ng)�D(zhu��n)�Ǿ��ȵ���Փ����
�w �� (�Ї�(gu��)�ƌW(xu��)Ժ늹��о������� 100080)
��ժ Ҫ���D(zhu��n)�Ǿ�����늙C(j��)λ���ŷ�ϵ�y(t��ng)����Ҫ����ָ��(bi��o)�����O(sh��)Ӌ(j��)�ͷ���ϵ�y(t��ng)�r(sh��)��횽o�Գ�ֵ���ҕ������Ԕ��(x��)������Ӱ��D(zhu��n)�Ǿ��ȵĸ��N���أ��Ĺ��̌�(sh��)�H���l(f��)�������Ŕ[��(d��ng)늙C(j��)λ���ŷ�ϵ�y(t��ng)�������o����Ӱ��D(zhu��n)�Ǿ��ȵĸ���`���Ӌ(j��)��ʽ��Փ�����S�C(j��)��̖(h��o)������̖(h��o)��(du��)�D(zhu��n)�Ǿ��ȵ�
Ӱ푡�
1 �� ��
���Ŕ[��(d��ng)늙C(j��)�ŷ�ϵ�y(t��ng)������Ҫ���˹�����Ҫ���⣬�似�g(sh��)������Ҫ�������Ⱥ̈́�(d��ng)�B(t��i)Ʒ�|(zh��)�ɂ�(g��)���档
늙C(j��)�ŷ�ϵ�y(t��ng)���D(zhu��n)�Ǿ����ɸ���`���С�������總����ʾ��
2��Փ����
���ڼt��ͼ������ϵ�y(t��ng)�е����Ŕ[��(d��ng)늄�(d��ng)�C(j��)����ϵ�y(t��ng)��������(du��)�侫�������M(j��n)�ж��Եķ��������Է����ăɷ����U����
a��ϵ�y(t��ng)��(w��n)�B(t��i)�`���Ӱ����ط��Ӱ푙C(j��)����
b��Ӱ�ϵ�y(t��ng)���ƾ��ȵĸ����صĔ�(sh��)�W(xu��)���_(d��)ʽ��
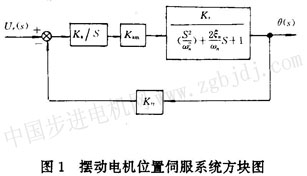
�ڼt��ͼ������ϵ�y(t��ng)�У��[��(d��ng)늙C(j��)ͨ�������(q��)��(d��ng)ƽ���R����ˣ�늙C(j��)��ؓ(f��)�d��ҕ�鼃�T��ؓ(f��)�d���H���ڑT��ؓ(f��)�d��ֱ��늄�(d��ng)�C(j��)λ���ŷ�ϵ�y(t��ng)�����Y(ji��)��(g��u)��D1��ʾ����M�ɰ���늙C(j��)��λ�Â�������ǰ�÷Ŵ����(q��)��(d��ng)�·�����ΰl(f��)�������鱣�Cϵ�y(t��ng)��(du��)λ��ݔ����̖(h��o)�ķ�(w��n)�B(t��i)λ���`����㣬��ԓϵ�y(t��ng)�O(sh��)Ӌ(j��)��l��ϵ�y(t��ng)��
ka-ǰ�÷Ŵ������� kam-�ŷ��Ŵ������� ktr-��λ�Ƃ��������_�h(hu��n)����kt-���D(zhu��n)�س���(sh��) km-늙C(j��)�ŵ�Ч����
늙C(j��)�����l�� j-늙C(j��)�D(zhu��n)
�ڑT���cؓ(f��)�d�T��֮�� ��n늙C(j��)����ϵ��(sh��)
2��1�o�B(t��i)�`�����
�[��(d��ng)늙C(j��)�ŷ�ϵ�y(t��ng)���o�B(t��i)�`������늙C(j��)��ؓ(f��)�d���������^(q��)���Ŵ�������Ư�Լ�λ�÷���Ԫ�������쾫�ȡ����b���ȵ�����
2��1��1늙C(j��)��ؓ(f��)�d���������^(q��)��i����`��ǡ���t
�[��(d��ng)늙C(j��)���������ճ�������늴�����ɲ��֡�
ճ�������D(zhu��n)�ذ����L(f��ng)��͙C(j��)еĦ�����ᣬ����һ�(xi��ng)�c�D(zhu��n)�����P(gu��n)���������أ��ɱ�ʾ��:
��(du��)��һ�����D(zhu��n)ʽ늄�(d��ng)�C(j��)��ճ������ؿ���늙C(j��)���Ƅ�(d��ng)�����������(du��)�ڔ[��(d��ng)늙C(j��)�����D(zhu��n)���ڔ[��(d��ng)�^(gu��)����˲�r(sh��)�ٶȕr(sh��)�̰l(f��)��׃������ˣ�һ���ȡ��(j��ng)�(y��n)��Ӌ(j��)ֵ��
���Ŕ[��(d��ng)늙C(j��)��늴������D(zhu��n)�ذ����F���Мu������������D(zhu��n)�غͷ�늄�(sh��)�a(ch��n)�����@�M�е��������������������D(zhu��n)�ء���?y��n)���늙C(j��)��늉�ƽ�ⷽʽ���ѽ�(j��ng)���]�˷�늄�(sh��)�����ã�����늙C(j��)�������ѽ�(j��ng)������ԓ늴������D(zhu��n)�ء����ڶ����F�IJ��õ�Ƭʽ�Y(ji��)��(g��u)�u��������������D(zhu��n)�ص�Ӱ푿��Ժ��Բ�Ӌ(j��)��
����늙C(j��)��ؓ(f��)�d�д����������ᣬ���˷��@��(g��)�����ʹؓ(f��)�d�\(y��n)��(d��ng)������늙C(j��)�Ķ����@�Mͨ��һ����������@����ζ�������(q��)��(d��ng)�·��Ҫݔ��һ��(g��)�`��늉�������(y��ng)��늙C(j��)ݔ��һ��(g��)�`��ǣ��@�������������`���ԭ��
2��1��2�Ŵ�������Ư������`�����a
�Ŵ�������Ư��u����鹦�ʷŴ��·��ݔ�������i������o�B(t��i)�`��飺
�@����Ҋ�����pСϵ�y(t��ng)���o�B(t��i)�`���Ҫ��ϵ�y(t��ng)��늚ⲿ��λ�÷���Ԫ����ǰ�÷Ŵ����������(q��)��(d��ng)�·)�������ߵ����档�������{(di��o)ԇ�Е�(hu��)�l(f��)�F(xi��n)��äĿ���ϵ�y(t��ng)���_�h(hu��n)�Ŵ�ϵ��(sh��)��������(hu��)�Ɖ�ϵ�y(t��ng)�ķ�(w��n)���ԗl�����Ķ�ʹϵ�y(t��ng)�o(w��)����������˿����f(shu��)���ϵ�y(t��ng)����λԣ���c��ֵԣ�������ϵ�y(t��ng)�_�h(hu��n)�Ŵ�ϵ��(sh��)�M(j��n)������D(zhu��n)�Ǿ��ȵ�ǰ��l����
2��1��3λ�÷���Ԫ�����`�����tr
λ�÷���Ԫ��ֱ���c늙C(j��)���B�����������`����b�`���(hu��)ֱ�ӷ�ӳ��늙C(j��)ݔ���ϣ����`��ٶ����tr���D1ϵ�y(t��ng)�����o�B(t��i)
�`��飺
����e=����f+����a+����tr
2��2��(d��ng)�B(t��i)�������
��(d��ng)늙C(j��)�ŷ�ϵ�y(t��ng)��ۙݔ����̖(h��o)�\(y��n)��(d��ng)�r(sh��)����ݔ����̖(h��o)�����ٶȡ����ٶȵȷ����r(sh��)����ôϵ�y(t��ng)����ܳ��F(xi��n)��ۙ�`�һ���@�N�`��ʜ���Ġ�B(t��i)���F(xi��n)���ʷQ���(d��ng)�B(t��i)������ֵ�ɱ�ʾ�飺
�Dlϵ�y(t��ng)ݔ��8(s)��(du��)ݔ��ur(s)���`��飺 |