�oλ�Â���������늙C�ӑB��ͨ�D���ŷ�����
���ƽ(��������WԺ300050)
��ժ Ҫ����������늙C�ӑB��ͨ�D�ؿ��ƵĻ�������ԭ��������˻��ڶ��Ӵ�朱�ֵ����λ���^�y���Լ������Ĵ�ͨ�^�yģ�͡������@һ�����o���M�Ѕ������R��Ӌ�㺆�Σ�����m�ϑ����ڟoλ�Â������Ľ���늙C��ͨ�D���ŷ����ơ�
1 �� ��
�ŷ����øБ�늄әC���ڽY�����Ρ��r��������S�o���㣬���Ŀǰ���ŷ�ϵ�y���ԫ@�ÏV�����á��mȻʸ�����Ƽ��g�İlչʹ�ý���늙C�ŷ�ϵ�y�Ŀ��ƫ@�����^�õĽ�Q���������@�N���Ƽ��g���M�еĸ��N׃�Q�cӋ��ʮ�֏��s����֮늙C������׃����ʸ���������Ե������ԣ����ϵ�y���F�@�N���ƾ���һ�����y�ȣ����Ҍ��H����Ч���ЕrҲ���y�_����Փ������ˮƽ��늙C�ӑB��ͨ�D�ؿ��ƣ������漰ʸ�������еĸ��N׃�Q�c����̎��������ͨ�^�ڹ̶�����ϵ��ֱ�ӌ����Ӵ�ͨ�c�D���M��Ӌ�㡢��Ӌ�����F늙C��ͨ�c�D�صĄӑB���ơ��������㷨���Σ����r�Ժã�����m���ŷ�����ϵ�y��Ȼ����ϵ�y��λ�Â������Ĵ��ڕ����ϵ�y�ɱ����ӣ�ͬ�r�����ֽ����˿ɿ��ԣ����������P�ڟoλ�Â���������ϵ�y���о������ڽ����ŷ������I���Ы@���˘O�����ҕ����ȡ����һ�����Mչ�����ڄӑB��ͨ�D�ؿ��Ʒ���đ��ô_�������㡣����������Ĵ�ͨ�^�yģ���cλ���^�y�����o���M�Ѕ������R������Ӌ�������٣�������ɵ��ŷ�ϵ�y�ܳ�ְl�]�ӑB��ͨ�D�ؿ����㷨���εă��ݡ�
2���ڶ��Ӵ�ͨ朱�ֵ����λ���^�y��
�ڹ̶�����ϵ�£�����늉����̞飺
����ʽ���y���������Զ�����艺�������Ӵ�ͨ朌���us(s)�ķ����\�ӣ���ͨ�^������׃��Ԫ�_�P���m���ГQ���Ϳ���Ч�ؿ��ƶ��Ӵ�ͨ朰��o��Ҫ�����D�c׃���������C���ڶ��Ӵ�ͨ朷�ֵ�㶨�r��늙C�D�،�ֱ���ܶ����D�Ӵ�ͨ��D��ǵ�Ӱ푣��Ķ�ͨ�^���ƶ��Ӵ�ͨ��_������늙C�D�ص�Ŀ�ĵġ�����ڿ����^���У��ͱ�회��r�z�y���Ӵ�ͨ朣��Ա��C���Ƶ���Ҫ����늙C����늉����̿��Ժܷ���Ę������ͨ�^�yģ�ͣ��������ڵ��l�r������艺����Ӱ푣������ºܴ�Ĵ�ͨ��Ӌ�`���ˣ����˱��C��ͨ��Ӌ�����_�ԣ������^�yģ���������D���D�ٻ�λ����Ϣ��ͬ�r�@Ҳ���ŷ����Ƶ�Ҫ��
����늙C�Cе���ԣ���D1��ʾ���əCе���Կ�֪늙C�D�ٌ��S�D�ذl��׃�������D�؞�tn�r�̵Č����D��n1n�����D�؞�tn+1�r�̌����D�ٞ�n1n+1������Եõ�:
��r���D���D�ǡ�����ʽ(5)����ͬ�����ٶȦ�0�����Ҫ����ͬ�����ٶ�Ӌ��ģ�͡�����ʽ(1)�o���Ķ���늉����̣��ɵõ���
ʽ�С�t��2��Ӌ����g���r�g�����ڲ����˱�ֵ���M��Ӌ�㣬��ͨ朵Ħ����·����ı�ֵ�܅���׃����Ӱ푺�С����������������_�_����ͨ朵��D���c���ٶȣ��M���_���D���D�ӵĽ�λ�ơ����]��늙C�D�ش��������Pϵ��
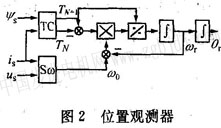
����ʽ(5)��(6)��(9)��(10)��(11)���ɘ����λ���^�y��ģ�ͣ���D2��ʾ��
�D2��tc���D��Ӌ���Ԫ��s�؞�ͬ���D��Ӌ���Ԫ��
3 ���ڶ���늉��c����Ĵ�ͨ�^�yģ��
�ڹ̶�ֱ������ϵ�£������D�Ӵ�ͨ朷����c�D��늉����̿Ɍ���������ʽ��
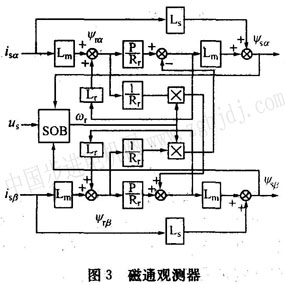
���]���������̶��x�ڦ���������ϵ�������@Щ���̼�ǰ��õ���λ���^�y�����ɵõ����Ӵ�ͨ�^�yģ�ͣ���D3��ʾ��
�D3��sob���D���^�y��Ԫ���������^�y�����������D����Ϣ����˿�������늙C�ڵ����\�D�r����ͨ�����_��Ӌ���@���ŷ������ǘO����Ҫ�ġ�
4 �oλ�Â���������늙C�ӑB��ͨ�D���ŷ�����
�D4�o����늙C�ӑB��ͨ�D���ŷ�����ϵ�y�ĽY���D��ϵ�y����늉�����׃ |