���M늙Cϵ�y��ͬ������������Ե�Ӱ�
������ �����i(�����I���I��W150001)
�� �� ���У���㽭��W��
ժ Ҫ ϵ�y�о����M늄әCϵ�y�IJ�ͬ������������Ե�Ӱ푣���һ���ֽ�B��늉���߉ͨ늠�B��Ӱ푡�
�� �~ ���M늄әC��������Ӆ���
1�� ��
���M늄әC�Ļ������ԣ��砿�����ԡ��������ԡ������D�����Լ��ؽ����Եȣ����^��������Ϥ�����Dz��M늄әC߀��һ��^������ܞ���Ҫ�����ԡ���������ԣ����^�����裬ȱ��������ϵ�y�������J�R���@һ������������ڌ��������Ӱ푵����غܶ࣬�^�y������Ҏ���ԣ�һ�������ڌ�������Զ����о��ķ������ֶβ����ơ�
���߽�����������Ԝyԇϵ�y[1]���錍��о����M늄әCϵ�y����������ṩ���ֶΣ��M�������˲��M늄әCϵ�y������Եķ���ģ�ͺͷ���[2]����Q�ˌ�������ԵĶ���������Ӌ�㣬�����Ì��ͷ���ķ���ϵ�y�ط����ͽ�B��ͬ�ą�����������Ե�Ӱ푣������ڌ���������Mһ���˽�����գ����OӋ������͑���ϵ�y�Ĺ����߶��DZ�Ҫ�ġ�
��ʹ���о��ĽY���ЬF�����x�ʹ����ԣ����ĵ��о��Y�ό��H��ϵ�y�M�У����Hϵ�y�ɑ������V���Ķ�����ʽ���M늄әC�ͽ�������������M�ɡ�
2������Ե�һ���f��
��������ò��M늄әC�D�ӽ��ٶȲ��ӵ�����c�����}�_�l�ʵ��Pϵ��ʾ���Ǻ���늄әC�\��ƽ���Ե���Ҫ���ԣ�������Ե����c���ڲ�ͬ���l������FһЩ��ֵ�c���������ą^�g��ǰ����ijһ�C���D�ص��l���c�����l����һ�µ��C���c�����߄t�����������ؓ�����B�IJ������^��
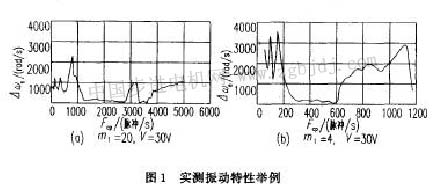
�D1��ʾ���y�ĵ��͵�������ԣ����y���M늄әC��һ�_86bh250b�Ͷ�����ʽ���M늄әC���������g�����飺���@�M���r=1.2�أ�늸�l=10. 0mh���D���D�ӑT��j=2.4��10-4kg�������D늄�ϵ��ke=0. 028 6v/(rad/s)������ϵ��p=l.4��10-4nm/(rad/s)���~�������1= 3a;�����D��tk��5nm����λ�D��to=0.15nm���D���X��z= 50�������������������ͨ늠�B�����Ԟ�m=1��4��8��10��20�����ż�늉����r��30v��
2.1�l��Ą���
���M늄әC���Լ��Ĺ����l�ʻ���Ȼ�l�ʣ�����������ʽ���㣺
����ԇ늙C�Ĕ������˞飺
���T�ϰ�fcp=fo���������µ��l��Q����l�Σ����l�εĄ������Ǹ����l�ʵ�****ֵ��ͨ����fcp=mifo���������ϵ��l��Q����l�Σ����϶����l��֮�g�Q�����l�Ρ�
�ԈDla�����Ԟ�����fo��160�}�_��s��m1=20�����w�ϵĄ��ֿ��J�飬200�}�_��s������l�Σ�3 000�}�_��s���Ϟ���l�Σ�200��3 000�}�_��s֮�g�Q�����l�Ρ��Dla�������l�΄��ֿ��Կ������ڵ��l��fcp=160�}�_��s̎��һ��ֵ���@����ͨ�����f�ĵ��l�C���c�����l����fcp=400�}�_��s��800�}�_̎���C���c����fy=5fo̎������^�ߣ����^ͻ�������l����fe=3 200�}�_��s������һ��ʎ�^����fp>3 600�}�_��s̎���^���@�IJ������^��
2.2����늴�����
���M늙C���ڲ�ͬ�l��ݔ���}�_�Ŀ����£���һ����߉��Bѭ�hͨ늶��\�D�ģ���˴��������N����늴����ڣ���һ�������}�_�l��fcp�ĵ������������}�_���ڣ�
��һ����ͨ�߉ѭ�h�����ڵ�늴�ϵ�y�������ڣ����늄әC��߉ͨ늠�B����m1���t�У�
늙C�@�M늉�������Ļ����l�ʞ飺
|