���ʽ���M늄әC��ʎ���ԵČ���о�
�� Ӣ(�A��������W��h430074)
�����ࣨ�����I���I��W��
ժ Ҫ ͨ�^���y������ʽ���M늄әC����ʎ���������������˻��ʽ���M늄әC����ʎ���c��ָ�����M늄әC����ʎ�����|�ɷ֞���һ���늙C��������ʎ����һ���늙C���Լ���ʎ��
���~ ���M늄әC��ʎ���ٶ�
1�� ��
���M늄әC�ڷ��B�\�Еr�����ڶ�N���ص�Ӱ푣���늙C�����·����ȫ���Q�����·����ȫ���Q�ȣ����������D�ӵ�˲�r���ٶȵIJ��ӡ�늙C��ijЩ�^���\�Еr�����ٶȲ��Ӻܴ��F��һ�N��ʎ�F����ʎ�F��Ĵ��ڣ�ʹ��늙C������ؓ�d�����½������ؕr����ʧ�����ܹ������������늙C����ʎ���Լ����о��Ǻ���Ҫ�ġ�
2���M늄әC����ʎ����
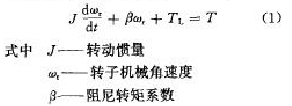
���M늄әC���\�ӷ��̞飺
���������늙Cϵ�y��늙C�ڷ��B�\�Еr��늴��D�ؑ���һ��ֵ�����H��늙Cϵ�y�����ڶ�N���ص�Ӱ푣�늙C��늴��D���Dz���׃���ġ���׃늴��D�صĴ��ڣ�ʹ��늙C�Č��H���ٶ��Dz���׃���ģ�����늙C���ٶȵ�ƽ��ֵ�ϯB����һ����������������
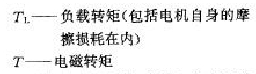
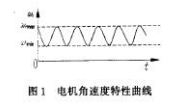
��늙C��ij�����}�_�l��(f cp)�\�Еr������ٶ���һ****ֵ����Сֵ����D1��ʾ�����ٶȲ��ӵķ��ֵ�飺
��ʽ��ӳ늙C���ٶȵIJ��ӡ�����늙C�\��ƽ��������늙C�\�в�ƽ��������ʎ�����ٶȲ��ӵķ��ֵ�c�����}�_�l�ʵ��Pϵ�����Ա�ʾ
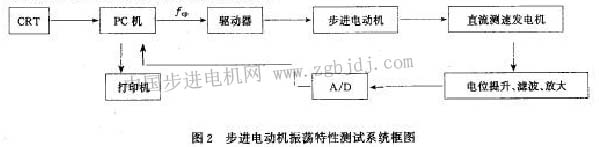
�yԇ�^�̞飬��Ӌ��C�l�������l�ʵĿ����}�_�o���M늄әC��������늙C�ڽo�����l���\�С����߾��Ȝy�ٰl늙C�c���M늄әCͬ�S�B�ӣ��t����ݔ��늉����猍�ط�ӳ�˲��M늄әC��˲�r���ٶ�ֵ��ݔ��늉���a/d�D�Q�����C�M�Д���̎����
4���ʽ���M늄әC��ʎ���Ե����c
���y������ʽ���M늄әC����ʎ���ԣ��Դ˷������ʽ���M늄әC����ʎ���c���yԇ�әC��һ�_90byg5200b��������ʽ���M늄әC��늙C�Ļ������g�����飺�D���X��zr=200������Ǧ�=0.09��10. 18�ȣ��D�ӑT��t=4.1��10-4nm�������D��tk��5nm�������j=3a�����d�����l��fcp��6 000�}�_��s�����Դ��hh-1s3�����l������������ʽ���M늄әC������늙C�����·�����ǽ��ӣ�ͨ늷�ʽ��4-5��ͨ늣����������Ƶ��C�yԇϵ�y��늙C����ʎ�����M�Мy�����D3��әC���d�r�Č��y��ʎ����������
�Č��y����ʎ�����������Կ�����늙C�ж�����ʎ�^�Ρ�늙C����ʎ��ijЩ�^�α��F���C��F������fw<3k�}�_��s����ʎ�^�Σ�����fe=4��6. 2k�}�_��s�t�ε���ʎ����ʎ��ǰ���^������ʎ���ң���ʎ�^�g�^���������Լ���ʎ�����c���@�����ҵ���ʎ�^�ΰl����늙C�\�е����l�Σ����ԷQ�鲽�M늄әC�����l��ʎ�����l�������ԡ��ĈD3�Č��y�Y����֪�����ʽ���M늄әC�ĵ��l��ʎ�������أ�늙C����ص���ʎ�l����늙C�\�е����l�Ρ�
�ĈD3��Ҋ��늙C�ж��������c����ȡl=4 500�} |