�ڰ��vģ�K���S�ǣ���(sh��)���D�Q�����x��
�촺�� ������ ����壨�����I���I(y��)��W 150001��
1����
�����ǙC�����D׃��������y��늙C�����nj��D����̖׃?y��u)����̖��Ԫ����������ݔ����һ��ģ�M�����ڔ�(sh��)�ֻ�����ϵ�y(t��ng)�б�회���׃�Q�锵(sh��)���������꣬�S����Ҏ(gu��)ģ�����·�İl(f��)չ��ģ�K���������ǙC�����D׃����һ��(sh��)���D�Q��(s/r-d)�ij��F(xi��n)��ʹ���N�S��λ�õęz�y���@ʾ���]�h(hu��n)�ŷ�����׃�úܷ��㡢�`�����ad��˾����ϵ�л��a(ch��n)Ʒ�����Ј������a(ch��n)ϵ�л�ģ�KҲ�ѳ��죬��ԭ���������c����ad��˾�a(ch��n)Ʒ�������ȫ���ԝM�㹤�I(y��)���ơ���(sh��)�ؙC�������I(y��)�C���ˡ���������ϵ�y(t��ng)�͙C�һ�w���I��đ��á�
Ŀǰ�Ј�����Ҋ����ģ�K���S�ǣ���(sh��)���D�Q����Ҫ�ЃɷN��ͣ���ۙʽ�Ͳɘ���αƽ�ʽ��ǰ�߿��Á혋�Ɇ�ͨ���S�ǣ���(sh��)���D�Qϵ�y(t��ng)�����߿��Á혋�ɶ�ͨ���S�ǣ���(sh��)���D�Qϵ�y(t��ng)�����OӋϵ�y(t��ng)�rֻ�����_���x�ú��OӋ�D�Qϵ�y(t��ng)�����������l(f��)�]ģ�K�������c�������_��ʹ�������_�����������o��������ָ�ˡ�
2��������ԭ��
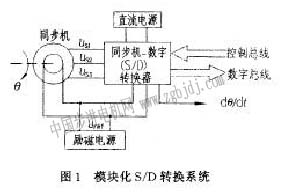
��ۙʽ����αƽ��ɘ�ʽͬ���C���ֽ���һ��(sh��)���D�Q��(s/r-d)ģ�K����ͬ���Cӛ䛺ͷֽ��������D׃���������S��λ�Üy����ϵ�y(t��ng)�У������y�S��λ���M�Д�(sh��)���@ʾ��䛻��ߞ�̎���������ṩ�S��λ�õĔ�(sh��)��(j��)ݔ��ͷ�����ʮ�ַ���ģ���һ�N�����ġ�����ه�κ�Ӳ���cܛ����ֱ�Ӿ��a��ͨ����ֻ��Ҫ�oģ�K�ṩ����늉���ֱ���Դ���ɡ��D�Q���Ĕ�(sh��)��(j��)ݔ������������B(t��i)���_��������ֱ���cӋ��C�Ĕ�(sh��)��(j��)�������B��������Ŀ�����̖ȡ��ϵ�y(t��ng)���ƿ������D1��ʾ��һ��ͬ���C�S�ǣ���(sh��)���D�Qϵ�y(t��ng)�����@һϵ�y(t��ng)�У�s/d�D�Q���ஔ�ڿ���ʽͬ���Cϵ�y(t��ng)�еĽ��ՙC��������ͬ���C���l(f��)�͙C��ݔ�������ཻ����̖����ݔ��ͬ���C�Ą��늉�����s/d�D�Q����ݔ���˿�ֱ�ӵõ����y��o�Ĕ�(sh��)�����ͱ��y�S���ٶ��ܵ�ģ�M�������o���M���κ����g���㣬���ʹ�÷ֽ������S�ǂ��������t���÷ֽ�������(sh��)���D�Q��(r/d)ģ�K��ϵ�y(t��ng)�������ֲ�׃��Ȼ�����ڌ��H�О阋��һ���M��o�����gָ�˵ġ������S�ǣ���(sh��)���D�Q����λ�Üy����ϵ�y(t��ng)���в���äĿ�ش_��ģ�K�������cϵ�y(t��ng)���w������ƥ�䡣
3�x������P���}
���ڸ�ۙʽ�D�Q�����ñ��ʷ�ʽ�D�Q���������ľ���ָ�˿����ں܌��ėl���M�㡣
3.1�ֱ���
s/r-d�D�Q��ϵ�y(t��ng)�ķֱ������x�����ֱܷ����С�Ƕ�׃������ȡ�Q�ڂ��������o�`����D�Q��ģ�K�ķֱ��������O���������o�`��D�Qģ�K�ķֱ�����aoc���t�M��ϵ�y(t��ng)�ķֱ����飺
�D�Qģ�K�ķֱ���������ݔ��2�M�Ɣ�(sh��)�a��λ��(sh��)��ʾ��һ��cλ�D�Qģ�K����ֱ����飺
���]�h(hu��n)�ŷ�ϵ�y(t��ng)�У�s/r-d�D�Qϵ�y(t��ng)�ķֱ���z/ose��������ϵ�y(t��ng)�����_���Ŀ��ƾ��ȡ����H�����У��y��ϵ�y(t��ng)�ķֱ������������ڿ���ϵ�y(t��ng)Ҫ����o�B(t��i)�`���eo��1/2������(j��)�@һ����Ҫ���������D�Qģ�K�����еķֱ����������Lc�飺
��Ӌ��ֵ�������(sh��)��c��ȡ����Ӌ��ֵ������(sh��)����ǰ���D�Q��ģ�K�����L���_18λ���ֱ�����(y��u)��0.1����ͬ���C�����D׃���������칤ˇ�����ƣ�����λ�`������������ú�С�������߽�λ�y���b�÷ֱ�������Ҫ�ϵK���ڂ������������ܝM��r���ɲ��ô־��M�ϵ��k������߷ֱ�����
3.2����
s/r-d�D�Qϵ�y(t��ng)�ľ��ȳ�����ݔ����(sh��)�ֵļә�ֵ�c���H�S��֮�g��****��ֵ��ʾ����ͬ���C��ֽ�����늚��`��D�Qģ�K���`��t�D�Qϵ�y(t��ng)�Ŀ��`��飺
3.3���ٶ�Ʒ�|(zh��)��(sh��)
�S�Dz������DŽ���׃���������ٻ�p�ٕr����ۙʽ�D�Q�����F(xi��n)�����`��������c�S�Ǽ��ٶȳ����ȣ����c�D�Qģ�K�ļ��ٶ�Ʒ�|(zh��)��(sh��)�ɷ��ȡ����ٶ�Ʒ�|(zh��)��(sh��)k���飺
|