������ʽ���M늄әC�Ŀ��d�Ͷ�·���
������ ���� ���� (�����I���I��W150001�����A��W)
l �� ��
������ʽ���M늄әC�Dz��M늄әC����Ҫ�aƷ֮һ���@�M늸���������Ҫ��������������������������ʽ���M늄әC�@�M늸еĺ����̜yԇ�������@�N������ԭ���c��ͨ����ͬ��늙C�Ŀ��d����·���y��ͬ��늸еķ�����һ�¡�������ͽ�B�@�N�����r�����{�˹����Ժͺ����ԣ������C���y�����ľ��_�ԛ]�Џ��{��Ҳ�]���������̽ӑ���@������ڮ��r��������ʽ���M늄әC�^���Ƶķ���ģ��߀�]�н��������]�Ќ��H���ã����@�M늸еľ��_ֵ����ʮ����ҕ��ֻ����������������һЩ�����u���r��������Ҫ�@�M늸еĴ���ֵ�����a�S�Ҟ��˝M���Ñ����@�N��Ҫ��ҲҪ�ڮaƷ�f�������ṩ�@�ӵĔ������������Ϸ����������eע��yԇ�ľ��ȣ���ʹ���f�ñ�y��늉����������ЧֵҲ���ԡ�
���ˌ�������ʽ���M늄әC���N�\�І��}�M��������о����������_�ķ���ģ������Ҫ�Ļ��A���@�M늸Ў��ǵ�һ��Ҫ�ą����������ľ��_�y�������Ҫ����ˌ������yԇ���������Mһ�����о������Ľ�B�@��о��е���Ҫ�ɹ���
2 ����b��
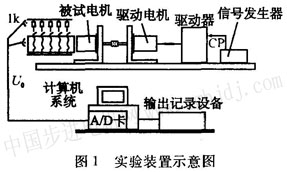
�yԇ�b����D1��ʾ����ԇ늙C���ձ�om��˾���a��pk566n��b��������ʽ���M늄әC���������@�M�ӳ������͡������ɼ���(a��d��)���_��adventech��˾��pcl--812��
3 ���Y��
����늙C���ӱ�ԇ늙C��1��15r��s�D�ٷ��������D��ÿ��0��5r��sȡһ�c����yԇ�c����ÿ�c�Ϸքe�y���_·��r��ÿ���늉�,�����·��r�µ�ÿ������Լ��քe��������һ���·�r�������(iak1,ibk1��ick1,idk1��iek1)��
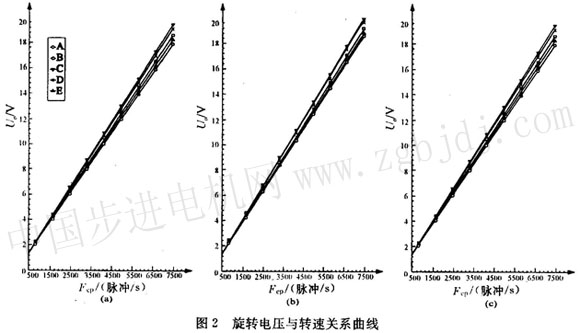
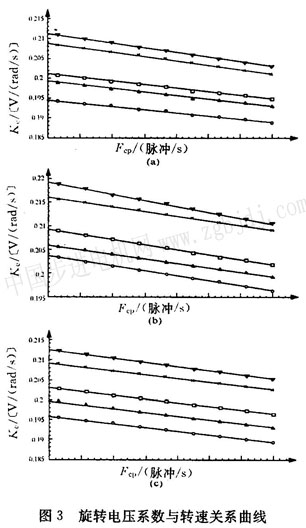
(1)�y�õ����D늉�������ֵ�c�D�ٵ��Pϵ��D2��ʾ��������D늉�(����)ϵ����D3��ʾ�������������������ͬһ�D������������D늉�����ȣ�����һ���IJ��P�Q�ȡ���3�_�әC�Ĝyԇ�Y���������@�N�����Q����һ����Ҏ�ɣ�����c��****���Ĵ�С������cdbea�������D늉�ϵ���S�D��(�l��)������������Щ�½����ܲ����]���D늉��IJ����Q�r��늄әC�����D늉�ϵ�����ø����ƽ��ֵ��ʾ����D3d��ʾ��
������r�£��������D늉�����λ�Pϵ�����Ǿ���������e�_72o늽Ƕ�(a��c��e��b��d)��
�yԇ�Y�������������e�_�ĽǶȴ_���c늽Ƕ�72o����С���ñ��yԇϵ�y�y�����@һ�`���С�ڱ��yԇϵ�y�ķֱ���(����fcp=500�}�_��s���\�����������t��늉����ڞ�20ms�������ɼ��ٶȞ�25khz��������늉��M�и��c�ɘӣ��tÿ���ڸ��ԵIJɼ��c����250�������M�б��ܲ�ֵ���t�ɘ��c���_500���������늉��^���c�ɘ��c��֮����k����������λ���Ҋ�y�e�_�Ƕȵľ��ȼs��o��72o)�����J����λ�Pϵ�nj��Q�ġ�
(2)�y�ö�·���������ֵ�c�D�ٵ��Pϵ��D4a��ʾ��Ҳ����ͬһ�D���¸���Ķ�·���ֵ����ȣ����ҿ��Կ�������·����ķ�ɢ�ȱ����D늉��ķ�ɢ��Ҫ��һЩ����Ҋ�@�N늄әC�������D늉������Q�⣬�@�M�ą���Ҳ�����Q��
��������늉�������IJ����Q���^С�����ϻ��ʽ늄әC���������迹�cؓ���迹�䱾��ȵ����c�����Խ��Ƶ����猦�Q��rһ�ӣ����@�M�����D늉��Ͷ�·����_�����@�M�ĵ�Ч�迹�͵�Ч늸У�ֻ���������ą�������ȣ���D4��ʾ��
�@�M��ƽ����Ч늸О飺
늸��c�D�ٵ��Pϵ������D4c��ʾ����Ȼ�������늄әC��ƽ�����D늉��������·�����ƽ��ֵ��ֱ�����ƽ����Ч늸�Ҳһ�ӡ�
4���c�f��
(1)�����Q�ԡ�������ʽ���M늄әC�����D���X��z r=50,�����0��72 o��0��36 o����500��1000����r�����úܷ��㡣����ԓ�D���X���Ƕ��������͘O�������������������M늄әCԭ����Ҫ���Ӹ��ŘO�ĘOѥ�㲻���܌��Q�ֲ�����Ҫ��ȡ���^���˹��eλ���M�����OӋ�r�M���������Q�����������O�ĘOѥ�Π�͘O�g���x������ȫһ�¡��@�� |