���M늄әC���ܼ��ֿ����·
���l�| (�������I��W ����710072)
1�� ��
���ַ����Dz��M늄әC��һ�N��Ҫ�Ӽ��g�����ڲ���׃늙C�Ȳ������������ŷ�ϵ�y�Y�����Ρ���λ��������c��ͬ�r���@����׃�˲��M늄әC���N���ܡ����IJ������Ҽ��ַ�ʽ����늙C�Ƚ�������ĈA�����D�ň��������@�M����ĺϳ�ʸ���ڿ��g���ȷ����D���D�Ӹ��S���ʸ������ͣ�������ʸ�����Q��������λ���ϣ�ͨ�^��������ϳ�ʸ���õ��D���\�ӵ��ٶȼ�λ�á�
���S��I���ϣ���Ҫ��늙C�\�Ӹ��ٿ�ݣ���Ҫ����ƽ���������ڙCе�ӹ��У���Ҫ�����M���������������C������ˇҪ����Ҫ��������ʽ�У�����ٶȝM�㹤��Ч�ʡ��M�ܽ����ŷ�늙C�܉�M������Ҫ���r��ߣ������·���s�������M늙C�ɱ��͡������ɿ������ƺ��Σ�����Ñ��Ěgӭ��ͨ�����M늙C�D���Dz��M�ģ��D���D�Ǧ��c�r�gt�ĺ����Pϵ���Ǿ��Եģ��D�ӏ�һ��ƽ���c����һ��ƽ���c�r���D���D�٦��ڸ��c������ͬ�����^�_����ʎ�������ǵ��ٕr���@�N�F��������@����Q����֮һ�nj�һ������Ǽ���n����ÿһ���}�_늙C��һ�����S��n�����ӣ��^�_����ʎ�F����u��ʧ��늙C�D����ȫ�����īI2����ܛӲ�����a�ķ�ʽ�����ڸ��l�r����Ӳ������ϵ�y�����l�r��ܛ����������\��ƽ���ԡ���������Ҫ���Ɇ�Ƭ�C����늙C��ij�N���ַ�ʽ�����������]�п��]�ɶ�֮�g�ٶ�㕽ӵ�ƽ���Լ��{�ٷ�����
2���·
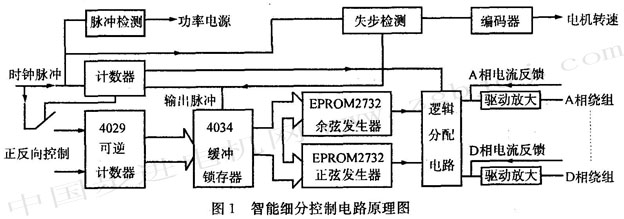
���·��Ҫ��Ҫ���늙C��ƽ���ԺͿ���ԣ���D1��ʾ��ݔ���}�_�l�ʵ��ڲ��M늙C��****�\���l�ʣ�fd�����}�_�����|�l����Ӌ����4029��eprom�Ĕ����T�����ҿ���Ӌ�����ď�λ�ˡ�Ӌ�������T�����ã����r��}�_���^nfd�r����늙C̎���R��ʧ����B��Ӌ����ݔ���P�]4029�r�ݔ���_�P������늙C��****�l���\�ж���ʧ����߉�����·���Ƹ����@�Mͨ늷�ʽ���_�P�r���ٕr�������p���ģ��������������Ŀ��ơ��ӷŴ�������Dz��{�ơ����^�����Ρ��Ŵ�����Ӳ��֡��������ְ�������z�y���Ŵ��ƽ�ƄӺ�У���h����
���·�����ԣ�
(1)��ȡ��ѭ�hʽ�ز��{���·�������ϵ�yЧ�ʣ�늙C�l�ή�͡�
(2)�p���ز�ʽ���·���κΕr���ܾ��_�����@�M�����ʹ����ݔ�������\��ƽ����
(3)늙C�oֹ�r�������}�_�z�y���Ԅ�����ϵ�y���ɽ����������ʹ������С��
(4)���������������ܣ����ڼ����R���c������ء�
(5)�Ԅӿ����·�ɱO�y��ʎ���R���c��������������Ρ�
3�YՓ
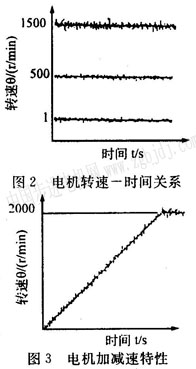
����������ʽ���M늙C�����D�_�Ĉ��ЙC�����D�_�c늙Cͬ�S�ӣ������D�_�Č��H����Ҫ���x��n=26���ü��⾫�ܙz�y�x��ӛ�늙C���N�D�ٵIJ��Ӻ�늙C�ļӜp�١��ĈD2��Ҋ���S�D�ٽ��ͣ�늙C����׃С���D3��ʾ늙C�Ӝp�ٕr���ٶȵ�㕽ӡ������·�������ˣ����ÿɿ������F���z�M�㌍�H����Ҫ��
�����īI
1 ����ˣ���������⼚�ֵIJ��M늄әC������ε�ӑՓ����늙C��1996(3)
2�����N����Ƭ�C���ƵIJ��M늄әC�C������ϵ�y����늙C��1996(3)
�M�룺 |