������ʽ���M늄әC�ز��ӷ�ʽ�Č��F
������ ��� �w�^��
(�Ϻ���ͨ��W200030������|�S)
��ժ Ҫ���ڷ�������ʽ�ͻ��ʽ���M늄әC��ͬ�����c�Ļ��A�ϣ������������ʽ���M늄әC�Ĕز��ӷ�ʽ��ᘌ������ϡ���۵���׃����Փ���@�M����ęz�y���D�Q��������������\�пɿ��ԣ��OӋ�˹��������ı��o늣�·��
l�� ��
���ʽ���M늄әC�c����ʽ���M늄әC��ȣ����зֱ��ʸߡ������С�����ĵ͡��D���w�e�ȴ�����c��������1987�����Ƴ����ʽ���M늄әC�����������@Щ�@�����c������Խ��Խ���Ñ��IJ�Ŀ���ڲ���10��ĕr������OӋ���������칤ˇ��څ���ƣ����ԝM�㹤�I���a��Ҫ�����������Mչ�s�ܾ����������Ǵ��D�ػ��ʽ���M늄әC���Ӹ��������⡣����ԭ����Ҫ���\�пɿ��Եͣ��ӷ�ʽ�����ʹ���ʽ���M늄әC�����ƏV���á���˲����µĹ��������͌��ü��ɿ������������b�����N�늙C���ӿ��Ƽ��g�����о�ᘌ����ʽ���M늄әC���ӿ��Ƽ��g���Ǹ�׃Ŀǰ��������r�ĬF��;����
2���ʽ���M늄әC�������c
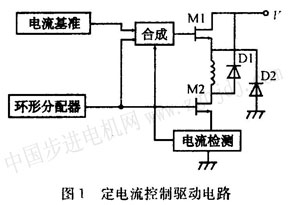
�ز����Ƽ��g�ڷ���ʽ���M늄әC���������ѫ@�Ñ��ã����ҷNܶ࣬���е�һ�N������������·��D1��ʾ���h�η�����ݔ�������̖���ƹ��Ź�m2����m2��ͨ�r��������z�y��̖����������ʣ��t�ɺϳ��·�a���Ĕز���̖�P��m1���@�M����m��һ�Εr�g��t����t���ӕr�·�a��)��
����z�y��̖С��������ʣ��ز���̖�_ͨm1���S����������ʛQ�����@�M�����
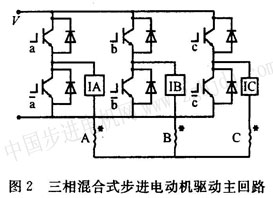
�c�D1�з���ʽ���M늄әC���·��ͬ��������ʽ���M늄әC��������·��D2��ʾ���Ϙ�۵�3�����Ź�ʹ�����M�����Ŀ����Դ����۵�3�����Źܹ���һ�M�����Ŀ����Դ��
����ʽ���M늄әC���@�M����džΘO�Եģ������@�M������·���Ǫ����ġ������ʽ���M늄әC���@�M������p�O�Եģ���ͨ늠�B��ͬ���@�M���B����ʽ���@�M����Ĵ�СҲ��ͬ����a���@�M����������D2�е�����·����������12��ͨ늠�B�r����ab��abc��bc������(a��ʾ�Ϙ�۹��Ź�a��ͨ��a��ʾ��۹��Ź�a��ͨ�������)��
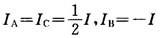
(1)ͨ늠�B��ab����Ч�·Ҋ�D3a��
ia=-ib=i��ic=0
ʽ�� i�����������
(2)ͨ늠�B��abc����Ч�·Ҋ�D3b��
(3)ͨ늠�B��bc����Ч�·Ҋ�D3c��
ia=o��ic=-ib=i
����ȥ��ͨ늠�B������������������֪a���@�M���������С���Ξ�
  ��. 3�@�M����ęz�y���D�Q
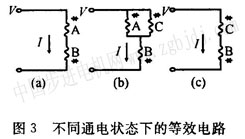
���ڈD2������۵Ĺ��Ź�ʹ���ĽM�����صĿ����Դ���Լ��@�M������p�O�ԣ�������茦����z�y���z�y��̖��̎�����s��
�D2�е�3�����������ia��ib��ic���û��ڴň�ƽ��ʽԭ���Ļ������������������ݔ����̖��·�ʹ��y�����·�ǻ�����x�ģ��y���`��С�������r�gС��1��s�����y������l�ʷ�����0��1 50khz�����Զȸߣ�ݔ���cݔ������ȣ����@�M��������r����������ݔ��늉��������@�M�����ؓ�r��ݔ��늉���ؓ��
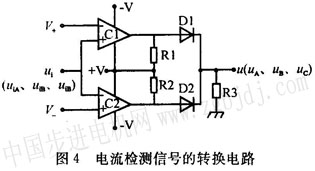
�D4���p�ޱ��^�·���p�O�Ե�����z�y��̖ui�D�Q�ɆΘO�Եķ�����̖u��v+��v_�քe������ͷ���������ʣ�v+=-v_�������Զ��O��d1��d2�Ĺ܉�������|ui|����v+��|v_|�r��  ��tu=o�� �����@�M����Sͨ늠�B׃�������D4�·�õ��ķ�����̖u a��u b��u c��ֻҪ |