╗∙ė┌─Ż║²═Ų└ĒĄ─╦┼Ę■ŽĄĮyūįš{š¹╝╝ąg
└Ņ╚~╦╔ │╠╔Ų├└ Óćųę╚A Ūžæø(╚Aųą└Ē╣ż┤¾īW╬õØh430074)
ĪŠš¬ ę¬Ī┐╦┼Ę■ŽĄĮy─Ż║²ūįš{š¹┐žųŲŲ„īó─Ż╩ĮĘųŅÉĪó─Ż║²═Ų└ĒĪó╠žš„┴┐▒µūRĄ╚╝╝ągĮY║ŽŲüĒŻ¼ī”ė┌žō▌d▐DäėæT┴┐Ą─ūā╗»ęį╝░ÖCąĄš±äėĄ╚Ż¼Įø▀^10ėÓ┤╬Ą─š{š¹Ż¼┐╔ęįīó╦┼Ę■ŽĄĮy╦┘Č╚┐žųŲŲ„Ą─į÷ęµūįäėš{╣ØĄĮ▒╚▌^ØMęŌĪŻīŹ“×ūC├„Ż¼įō╝╝ągĘĮ░Ė╩Ūėąą¦Ą─ĪŻ
1ę² čį
╣”┬╩ļŖūė╝╝ąg║═╬óļŖūė╝╝ągĄ─░lš╣Ż¼┤┘▀M┴╦╦┼Ę■ŽĄĮyį┌╣żśIųąĄ─æ¬ė├ĪŻ╚╗Č°į┌īŹļHæ¬ė├▀^│╠ųąŻ¼┤µį┌ų°ÖCąĄ╣żør░l╔·ūā╗»ĢrꬎÓ欚{š¹┐žųŲŲ„ģóöĄ▀@ę╗å¢Ņ}ĪŻ×ķ┴╦╩╣ŽĄĮy─▄ē“║═ÖCąĄžō▌d▒╚▌^║├Ąž┼õ║ŽŻ¼Š═ąĶę¬╚╦×ķĄž▀Mąąš{š¹Ż¼▀@ę¬Ū¾Š▀ėąīŻķTĄ─ų¬ūRĪŻę“┤╦Ż¼Å─æ¬ė├Ą─ĮŪČ╚│÷░lŻ¼īŹ¼F╦┼Ę■ŽĄĮyĄ─ģóöĄūįäėš{š¹╣”─▄╩ŪīŹļHæ¬ė├Ą─Ų╚ŪąąĶ꬯¼ę▓╩Ū╦┼Ę■ŽĄĮyŽ“ųŪ─▄╗»░lš╣Ą─┌ģä▌ĪŻ
─┐Ū░ūįäėš{š¹╝╝ągų„ę¬Ęų×ķā╔ŅÉŻ¼ę╗╩Ū╗∙ė┌─Żą═Ą─š{š¹╝╝ągŻ¼Č■╩Ū╗∙ė┌ų¬ūRĄ─š{š¹╝╝ągĪŻ╗∙ė┌─Żą═Ą─ūįš{š¹╝╝ągąĶę¬═Ō╝ė╠ž╩ŌĄ─£yįćą┼╠¢Ż¼╚╗║¾Ė∙ō■ŽĄĮyĄ──Żą═ĮYśŗ▒µūR░l╔·ūā╗»Ą─ģóöĄĪŻ▀@ĘNĘĮĘ©ī”ą┼╠¢Ą─Š½Č╚ėąę╗Č©Ą─ę¬Ū¾Ż¼Č°ŪęŽÓæ¬Ą─ėŗ╦Ń┴┐ę▓▌^┤¾Ż¼ę╗░Ńę¬Ū¾ėą▀\╦Ń╦┘Č╚▌^┐ņĄ─╬ó╠Ä└ĒŲ„ĪŻ╗∙ė┌ų¬ūRĄ─ūįš{š¹╝╝ągŻ¼╩ŪĖ∙ō■ŅAŽ╚┤_Č©║├Ą─īŹļHĮø“×ęÄät║═īŹĢr│ķ╚ĪĄ─ŽĄĮy╠žš„┴┐┤_Č©┐žųŲŲ„Ą─ģóöĄŻ¼▀@ĘNĘĮĘ©▓╗ąĶę¬═Ō╝ė╠ž╩ŌĄ─£yįćą┼╠¢Ż¼Č°ų╗ąĶŽĄĮy▌ö╚ļ▌ö│÷ą┼╠¢Ż¼ę“┤╦ī”ą┼╠¢Ą─ę¬Ū¾▓╗Ė▀Ż¼Ą½ī”ęÄätų¬ūRę¬Ū¾▒╚▌^Ė▀Ż¼═©│ŻąĶę¬┤¾┴┐Ą─Š½┤_Ą─īŹļHš{š¹ęÄätų¬ūRŻ¼ę“┤╦ī”š{š¹║¾ģóöĄĄ─┐╔ą┼Č╚ąĶę¬Ę┤Å═“×ūCĪŻ
▒Š╬─Å─īŹļHæ¬ė├Ą─ĮŪČ╚│÷░lŻ¼╠ß│÷┴╦ę╗ĘN║åå╬┐╔ąąĄ─ģóöĄ─Ż║²ūįš{š¹ĘĮ░ĖŻ¼įō╝╝ągŠ▀ėąėŗ╦Ń┴┐ąĪĪó╚▌ęūīŹ¼FĄ─╠ž³cŻ¼ī”ė┌ūā╗»Ą─žō▌dŻ¼Įø▀^10ėÓ┤╬š{š¹║¾Ż¼┐╔ęįīó┐žųŲŲ„Ą─į÷굚{š¹ĄĮ▒╚▌^ØMęŌŻ¼▌^║├Ąž┼õ║Ž┴╦ūā╗»ŪķørŻ¼▓╔ė├ę╗░ŃĄ─╬ó╠Ä└ĒŲ„╝┤┐╔īŹ¼F▀@ę╗┐žųŲĘĮ░ĖŻ¼īŹ“×ĮY╣¹ūCīŹįōĘĮ░Ė╩Ū┐╔ąąĄ─ĪŻ
2ŽĄĮyĮYśŗ╝░ūįäėš{š¹įŁ└Ē
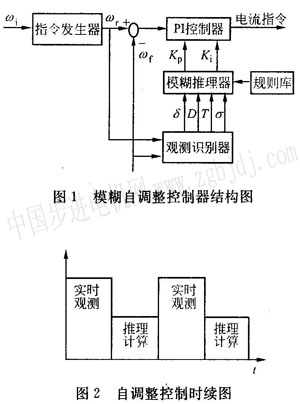
łD1╩Š│÷┴╦─Ż║²ūįš{š¹┐žųŲŲ„Ą─ĮYśŗ┐“łDŻ¼Ųõųą┐žųŲŲ„ė╔ā╔▓┐ĘųĮM│╔Ż¼┐žųŲŲ„║═ūįš{š¹ÖCśŗĪŻ┐žųŲŲ„▓┐Ęų×ķ╦┘Č╚š{╣ØŲ„Ż¼▓╔ė├piĘĮ╩ĮĪŻ║¾š▀╩Ū─Ż║²ūįš{š¹┐žųŲŲ„Ż¼╦³░³└©╦┘Č╚ųĖ┴Ņ░l╔·Ų„Īóė^£yŲ„║═─Ż║²═Ų└ĒŲ„Ż¼╦┘Č╚ųĖ┴Ņ░l╔·Ų„╩Ū×ķ┴╦Ę└ų╣╦┘Č╚Ēæ欫a╔·▀^┤¾Ą─ø_ō¶Č°įOų├Ą─ųĖ┴ŅŠÅø_ÖCśŗŻ¼ė^£yŲ„═©▀^▓╔śėīŹĢrĄ─Ēææ¬▓©ą╬Ż¼Å─ųą│ķ╚Ī╠žš„ųĄ╚ń│¼š{┴┐ĪóūĶ─ßę“ūėĄ╚Ż¼▓óī”▀@ą®ūā┴┐▀MąąęÄĖ±╗»╠Ä└ĒĪŻ─Ż║²╗»╠Ä└Ēīó▌ö╚ļĄĮ─Ż║²═Ų└ĒŲ„Ą─╠žš„ūā┴┐▐DōQ│╔ė├šZčįĘ¹╠¢▒Ē╩ŠĄ─║Ž▀mĄ─šZčįųĄŻ¼Ė∙ō■─Ż║²╗»║¾Ą─╠žš„┴┐┤_Č©Ēææ¬╠žąįĄ──Ż╩ĮŻ¼į┘└¹ė├╩┬Ž╚ŅAų├Ą──Ż║²ęÄätŻ¼┤_Č©╦┼Ę■ŽĄĮyųą╦┘Č╚┐žųŲŲ„į÷굥─š{š¹ą┼ŽóĪŻ─Ż║²═Ų└ĒŲ„Ą─▌ö│÷ĮY╣¹×ķpiģóöĄĄ─š{š¹ę“ūėŻ¼╚ń╣¹š{š¹ę“ūėĄ─ųĄ┤¾ė┌1Ż¼ą┬Ą─┐žųŲŲ„ģóöĄīóę¬į÷╝ėŻ¼╚ń╣¹ąĪė┌1Ż¼ätą┬Ą─┐žųŲŲ„ģóöĄīóę¬£pąĪĪŻ
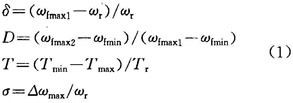
─Ż║²š{š¹┐žųŲĄ─Ģr└m╚ńłD2╦∙╩ŠŻ¼╦³Ęų×ķā╔éĆļAČ╬Ż¼īŹĢrė^£yļAČ╬║══Ų└Ēėŗ╦ŃļAČ╬ĪŻ
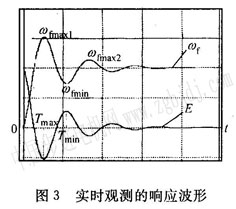
łD3╩Š│÷┴╦īŹĢrė^£yļAČ╬╦∙▓╔śėĄ─Ēææ¬▓©ą╬Ż¼e╩ŪĮoČ©ųĖ┴Ņ”žr║═Ę┤ü”žfų«ķgĄ─Ų½▓ŅŻ¼į┌─Ż║²ūįš{š¹ųą╦∙└¹ė├Ą─╠žš„┴┐Č©┴x╚ńŽ┬Ż║
tr×ķ╦┘Č╚ųĖ┴Ņ╔²ĮĄ╦┘ĢrķgŻ¼Ī„”žmax×ķ╦┘Č╚ĘĆČ©▀\ąąĢrĄ─****▓©äėųĄĪŻ
╔Ž╩ĮųąŻ¼”─╩Ū│¼š{┴┐Ż╗d╩ŪūĶ─ßę“ūėŻ¼t╩ŪęÄĖ±╗»Ą─š±╩Äų▄Ų┌Ż¼╦³┤·▒Ē┴╦Ēææ¬Ą─┐ņ┬²Ż¼”ę╩Ū╦┘Č╚▓©äė┬╩Ż¼╦³Ę┤ė│┴╦ŽĄĮyĒææ¬Ą─ĘĆæB╠žąįĪŻ×ķ┴╦£╩┤_Ąžė^£yĄĮ╔Ž╩÷Ą─╠žš„┴┐Ż¼ąĶę¬╩╣ė^£yų▄Ų┌▒╚īŹļHĄ─╦┼Ę■┐žųŲĒææ¬ų▄Ų┌ę¬ķLĪŻ
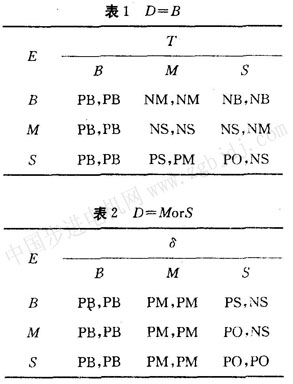
į┌═Ų└Ēėŗ╦ŃļAČ╬Ż¼«öÅ─▓╔śėė^£yĄ─öĄō■ųą│ķ╚ĪĄ─╠žš„ųĄ▌ö╚ļĄĮ─Ż║²═Ų└ĒŲ„║¾Ż¼ąĶę¬ī”▀@ą®ūā┴┐▀Mąą─Ż║²┴┐╗»Ż¼ė├ė┌▒Ē╩Š╔Ž╩÷─Ż║²ūā┴┐ļ`ī┘Č╚║»öĄĄ──Ż║²╝»║Ž░³└©sĪómĪóbŻ¼ī”ė┌▀@╦─éĆ╠žš„ūā┴┐Ųõļ`ī┘Č╚║»öĄČ╝╩Ūę╗ų┬Ą─ĪŻ─Ż║²═Ų└ĒŲ„Ą─▌ö│÷ĮY╣¹╩Ū╦┘Č╚piš{╣ØŲ„▒╚└²į÷ęµ║═ĘeĘųį÷굥─į÷┴┐ųĄĪ„cp║═Ī„ciŻ¼▀@ā╔éĆūā┴┐Š▀ėąŽÓ═¼Ą─ļ`ī┘Č╚║»öĄ║══¼śėĄ─šZčįĘ¹╠¢nbĪónmĪónsĪózoĪópsĪópmĪópbĪŻĖ∙ō■─Ż║²ęÄät┤_Č©ā╔éĆį÷┴┐╩Ūę╗éĆ─Ż║²øQ▓▀å¢Ņ}ĪŻøQ▓▀ĘĮĘ©ų„ę¬ėą╚²ĘNŻ║
1Ż«Ė▀Č╚Ę©ĪŻ2Ż«ųą╬╗ųĄ┼ąøQĪŻ3Ż«╝ėÖÓŲĮŠ∙┼ąøQĪŻ
×ķ┴╦£p╔┘ėŗ╦Ń┴┐Ż¼▓╔ė├Ė▀Č╚Ę©┤_Č©┐žųŲŲ„ģóöĄĄ─į÷┴┐ųĄŻ¼ätš{š¹║¾Ą─╦┘Č╚┐žųŲŲ„ģóöĄ┐╔▒Ē▀_╚ńŽ┬Ż║
3─Ż║²═Ų└Ē╝░š{š¹ęÄät
×ķ┴╦Ą├ĄĮ£╩┤_Č°šµīŹĄžĘ┤ė│┐žųŲŽĄĮyĄ─╠žąįĄ─īŹĢrė^£y▓©ą╬Ż¼æ¬▒M┴┐▒ŻūC╩╣╦┼Ę■“ī |