���M늙Cϵ�y��ͬ������������Ե�Ӱ�(3)
������ �O�����������I���I��W150001��
�� �� ���У���㽭��W��
ժ Ҫ ������ȫ�ĵĵ������֣���Bؓ�d������������Ե�Ӱ푡�
�� �~ ���M늄әC�������ؓ�d����
1ճ�������ᣩϵ����Ӱ�
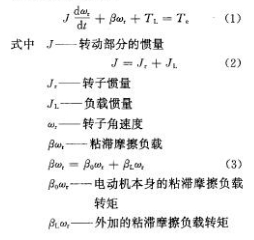
�c늄әC�Ľ��ٶȳ�����׃����ؓ�d�D�طQ��ճ��Ħ��ؓ�d���]����ӵ�ճ��Ħ��ؓ�d�r��늄әC��������һ������ęCеϵ�y������������������D�أ����а���С�Ď��Ħ���D�ؼ�С��ճ��Ħ��ؓ�d�D�ء�늄әC���\�ӷ���ʽ�飺
Ҫ�f�����ǻ��ʽ���M늄әC������Ħ��ؓ�d�D�أ����������ļ��Cеؓ�d�D�أ����H����Ҫ���F�p������ġ����D���D�����X�ӺͶ��ӘO����������F�ēp�ģ���Ҫ��늴Ź����ṩ�����F�����F�ēp���D�أ�Ҫ��늴��D��ؓ�������дŜ��p�Č������D�أ�������Ǝ��Ħ���D�ص����ԣ��u���p�ĵ��D�t����ճ��Ħ���D�ص����ԡ�
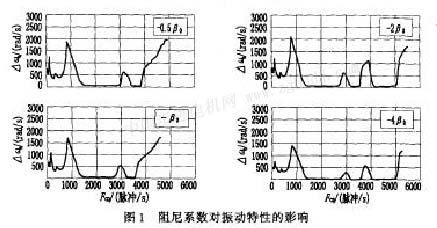
���о�������ԕr������ϵ����һ������Ҫ�ą���������ϵ�������ؓ��ϵ�y�϶��Dz������ģ��D1��늄әC���d������������ϵ����ͬ����r��������Եķ������������Կ���������ϵ������r�����l�����l��ʎ����������½�����׃������ʮ���@���������l�������^�t�a�����@��Ӱ푡�����ϵ���pС�r�����l�������^���ٶ���ʎ�����������һ���l����ʧ�������\�У�����ϵ�������ٶ���ʎ������pС��څ�ڷ������әCе�������ܸ��Ƹ��l�\�е�ƽ���Լ�����\���l���ԭ������ڴˡ�
����ָ����늴��D���еĮ����D�ط������c���ٶȳ�һ���ı����Pϵ���������D�ص����ԣ��Q��늴������D�ء����\���^��������������ã����Dz�������������p֮�У���������ʽ(1)�Ҷ�헃ȡ�늴������D���S���ٶ�����������r�������S���ٶ��������½��r��ؓ��������ֵؓ��****ֵ�_�����^�Cе�����D�ص�ֵ�r������ϵ�y��ɞ��������ؓ���ᣬ���F�������F������˞�����Cе����ϵ�����tϵ�y�ֿɻ؏ͷ������������õĽY��ǡ�÷����@�ӵ�ԭ���Է�����
2Ħ��ؓ�d��Ӱ�
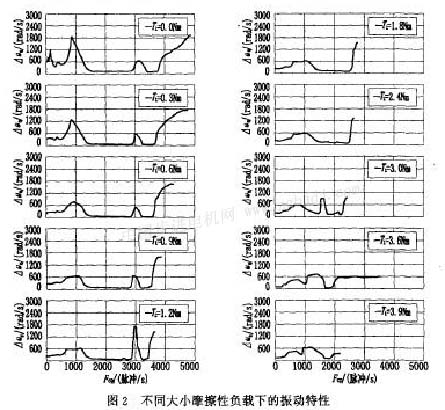
�D2ʾһϵ�в�ͬ��С��Ħ����ؓ�d�r������Եķ������������Կ���Ħ����ؓ�d�����l��ʎ���������ú����@�����l�C��r��늄әC�Ľ��ٶ�һ������֮ؓ�g���ӣ�Ħ����ؓ�d�ڽ��ٶȸ�׃����rؓ�d�D�صķ���Ҳ��׃������ṩ�˺����������ã�����ֻҪ�Լ�ؓ�d�����ٶȵIJ��Ӷ��õ�����Ч�����ơ�
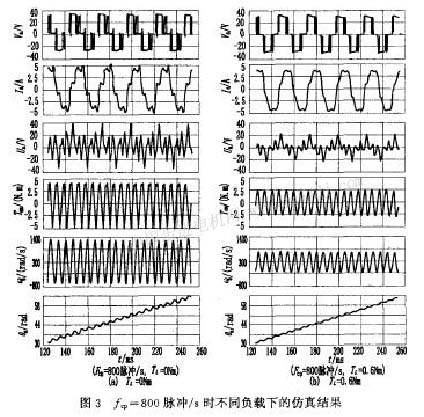
�������l�ε���ʎ��Ħ��ؓ�dҲ���^���@���������á�������������ؓ�d�^�m����tl=0.6nm�r�����l�ε���ʎҲ�õ��˺ܺõ����ơ��˺����Mһ������ؓ�d�r�����С����l�ε��������Ӱ푲����@���D3��ʾfcp=800�}�_��s��tl=o��tl=0.6nm�r늉�������ͽ��ٶȵȵķ��沨�Σ���������ؿ������d���������Ρ��D�ز��κͽ��ٶȲ��ε�׃����
�����l�������Ե�Ӱ푡�ؓ�d�^С�r�����l�������^�����ٶ���ʎ��������]�����@��׃����ؓ�d�Mһ������r�����l�������Լӄ����������^����l�^�Ƅӡ�
3�T��ؓ�d��Ӱ�
�D�ӑT����׃����ҪӰ�늙C����Ȼ�l�ʣ���Ȼ�l���c�D�ӑT����ƽ�����ĵ��������ȣ������l�����ǿ����}�_�P����Ȼ�l�ʵ��C����������D�ӑ��������������Ƶ��l��ʎ��
�T��ؓ�d������ʎ��ƽ���\�ӵ�����߀���������½�ጡ��D�ӵ��\�ӷ����،����£�
�����D��늽��ٶȁ���ʾ�r����ʽ�Ɍ�
|