���M늄әC�t���b��ϵ�y(t��ng)�еķּ����Ʒ�
�� �� ������ ���ƽ�������I���I(y��)��W150001��
ժ Ҫ ᘌ��t���b���·��(sh��)��(j��)�����l���^�͵����c�����Ќ����M늄әC��ϵ�y(t��ng)�еĭh(hu��n)�η������M���˸��M�������˷ּ����ƺͲ�ԃ������ʽ��ͬ�r��Qλ�ÿ��ƾ��ȺͿ��ƕr�g���}���o���ˑ��ô��·��ƽ���^���������C���˷����Ĺ��̌����ԡ�
�� �~ �t�⾀�b�ز��M늄әC��
1 ����
�������Ƶ��Ԅ�ƽ���^�У��x�������ŸБ���ʽ���M늄әC42byg131������Ԫ����ƽ�����ء����ˌ��F(xi��n)������̖�ğo���|���f�������˼t�⾀�b�ع�����ʽ��������̖�����a���{�ơ��Ŵ��Ժ��ɼt���b�ذl(f��)���·�l(f��)���ȥ��ƽ���^�ϵļt������·ؓ؟����̖���ա��Ŵ��{���g�a��߀ԭ������ֱ̖�����ڲ��M늄әC�Ŀ��ơ�����ƽ���^Ҫ�S���D�����������D����˲���������Ă��ӽY����ʹ���f�D�ص��X�P���ܲ�ƽ���x������Ӱ푣��@ʹ�������Cеϵ�y(t��ng)�Ĝp�ٱȺܴ�
������Ȼ�ƌW�����Y���Ŀ(59475017)
���b���·�����c�ǔ�(sh��)��(j��)�����l���^��[1]�����õ�vd5026/vd5027���a����a�·****̎���l�ʞ�2hz�����ƽ�����ص��D���^�͡����ò��M늄әC�����Ǟ�1.8�ȣ��tƽ�����ص�****�D�ٞ�2��1.8/256=0.014���^һ���A�ܵĕr�g��360/0. 84=428. 5min��7h���@Ȼ�y�ԝM�㹤�̌��H���õ�Ҫ��
2�ּ����Ʒ�ԭ��
���˝M�����ϵ�y(t��ng)����D�ٵ�Ҫ���Cλ�ÿ��ƾ��ȵ�Ҫ�ɲ��÷ּ����Ʒ�ʽ�Ͳ�ԃ������ʽ��
2.1�ּ����Ʒ�ʽ
�����}�_�l(f��)���·�ͭh(hu��n)�η�������������ֻ̖�Q���}�_��̖��ͨ�^�c�����Q��늙C�Ą����l�ʣ�ԭ����D1��ʾ����(y��u)�c�飺
(1)�����ˌ��b���·��Ҫ���b���·ֻ��l(f��)�����ƽ�������D�ӣ��͵��ƽ������ֹͣ���ɷN�ƽ��̖���ɡ�
(2)���Ը���(j��)��Ҫ�����O���}�_�l(f��)���·���l�ʣ��Ķ��{��(ji��)���M늙C���D�١�
�@�N���M�Č��|��ͨ�^����ͨ�r�g�Ŀ����_����λ�õĿ��ƣ����t���b���·���댍�F(xi��n)�r�g�Ĝʴ_�����DZ��^���y��[2]��
2.2��ԃ������ʽ
����˼��飬���b���·�o���D����̖��늙C�D�^ijһ�̶�����(sh��)��****���\�����ڵ�����(sh��)������̎ȡ16�����ڴ����g��������̖���Пo��Ӱ�늙C���\�С�����16������������̖�Ԟ錧ͨ�t����16������tͣ�D���@�ӣ�늙C���^�IJ���(sh��)�϶���16��������(sh��)�������Ԝʴ_�،��F(xi��n)λ�ÿ��ơ���Ҫ��Q�Ć��}�ǣ�
(1)�h(hu��n)�η�������ݔ�������16����һ�����ڡ�
(2)�h(hu��n)�η���������O��һ����(sh��)��(j��)������λ�à�B(t��i)������̖��
3�·�OӋ
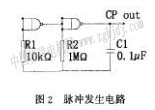
3.1�}�_�l(f��)���·
���ccd4011���ɣ�ݔ���l�ʞ�50hz��cp�}�_���·��D2��ʾ��
3.2�h(hu��n)�����[3��4]
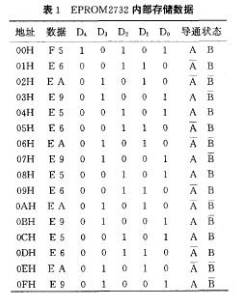
����Ӌ��(sh��)��74ls191��eprom2732���ɡ�74ls191��16�M�ƼӜpӋ��(sh��)����ݔ����ooh - ofh������eprom2732�ĵ�ַݔ�룬��ÿһ����ַ�������M늄әC��һ����ͨ��B(t��i)����74ls191���Еr��}�_�r�������ӻ�pӋ��(sh��)��ʹeprom2732�ĵ�ַҲ���ӻ�p�٣��Ķ������׃��ͨ��B(t��i)��ʹ늙C���D���D��
����16����ͨ��B(t��i)��ֻ��һ����B(t��i)�Q���Ƿ���տ�����̖����˰�eprom2732��ݔ����do - d3�������}�_��̖��d4�����B(t��i)������̖�������أ���Ȳ��惦��(sh��)��(j��)���1��ʾ��
��eprom2732��d4��̖�Ϳ�����̖һ�𘋳��c�T�_�P������늙C���\�Р�B(t��i)��늲��M늄әC��16�������ĕr�g��t=16/50=0.32s����˼t���b���� |