�����ͮ���늄�(d��ng)�C(j��)�̑B(t��i)��(ji��)�܆���(d��ng)��������
���|�x(������ͨ��W(xu��)710049)
ժ Ҫ ��B��һ�N�Æ�Ƭ�C(j��)���ƵĮ���늄�(d��ng)�C(j��)�̑B(t��i)��(ji��)�܆���(d��ng)����ԭ����ܛӲ���O(sh��)Ӌ(j��)�����ھ��l���}�_�|�l(f��)�h(hu��n)��(ji��)��ܛ����(d��ng)�h(hu��n)��(ji��)����(ji��)�ܭh(hu��n)��(ji��)�����ϙz�y(c��)�ȭh(hu��n)��(ji��)��(sh��)�F(xi��n)���C(j��)���ơ��˃x���ڹ�(ji��)�ܷ��������V韵İl(f��)չǰ����
�� �~ ����늄�(d��ng)�C(j��)��(ji��)�܆���(d��ng)
l �� ��
��(d��ng)���˂���(du��)�h(hu��n)�����o(h��)��(ji��)�s��Դ���}�����P(gu��n)ע����Ŀǰ��(gu��)��(n��i)�ձ���õĮ���늄�(d��ng)�C(j��)����(d��ng)����������ʮ����O(sh��)Ӌ(j��)�ģ��O�ٿ��]��(ji��)�܆��}�����m�Ϯ�(d��ng)�r(sh��)��늾W(w��ng)��������͉����Ԫ������ˇ�b��ˮƽ�����a(ch��n)���g(sh��)ˮƽ�ͳ����Զ����ߣ��V������Ч�ʵ͡�ؓ(f��)���ʵͺ�����(sh��)�͵ġ����͡���r���҇�(gu��)늄�(d��ng)�C(j��)�����ռ���l(f��)����İٷ�֮60�����\(y��n)��Ч�ʅs���ڰl(f��)�_(d��)��(gu��)�Ұٷ�֮30���������Ҫ��(du��)����(d��ng)�����ӹ�(ji��)�ܹ��ܡ����ԬF(xi��n)���O(sh��)Ӌ(j��)����(d��ng)�������·�r(sh��)������(y��ng)���C��(sh��)�F(xi��n)���_���ɿ��Ŀ���Ҫ���⣬��(ji��)�ܑ�(y��ng)��(d��ng)ͬ���ܵ�������ҕ[1]��
���������ƵĆ���(d��ng)���ǰ�ܛ����(d��ng)���g(sh��)��(ji��)�ܼ��g(sh��)�Y(ji��)����һ�𣬲������{(di��o)�ٹ��ܵ��b�á����������ƵĹ��ϙz�y(c��)�����o(h��)�h(hu��n)��(ji��)��ͬ�r(sh��)ʹ늙C(j��)���\(y��n)���^����ʼ�K̎�ڹ�(ji��)�ܠ�B(t��i)��
2ԭ��
2.1ܛ����(d��ng)ԭ��
���^늙C(j��)��ܛ����(d��ng)�����nj�늙C(j��)��ʩ늉��Ԅ�(d��ng)ƽ��������ʹ늄�(d��ng)�C(j��)��ֹͣ?f��n)�B(t��i)��M�d�\(y��n)�Р�B(t��i)�����ٵ��^�̡�����ܛ����(d��ng)���g(sh��)�ɱ���ȫ늉�ֱ�ӆ���(d��ng)�r(sh��)�a(ch��n)��6��7���~������ě_���͓p�ġ����w�����飺�Ɇ�Ƭ�C(j��)�ṩ�o���l��һ��(g��)��ʼ���ƽ�a��Ȼ���ڲ�ͬ�ĕr(sh��)�g��(n��i)�pС���l�ܵĿ��ƽǣ��Ķ�ʹ늄�(d��ng)�C(j��)�Ķ�늉�������ֱ���_(d��)���~��늉���
2.2��(ji��)��ԭ��
������(sh��)��9��(du��)�{(di��o)���·�Ĺ����кܴ�Ӱ푣�����ͬ�Ŀ��ƽ�d�£���(d��ng)ؓ(f��)�d�Ĺ�����(sh��)������r(sh��)����(d��o)늽ǿ�Ҳ�������l�����t�P(gu��n)��ĕr(sh��)�g���L(zh��ng)��������܌�(sh��)�r(sh��)��(zh��n)�_�y(c��)�î���늄�(d��ng)�C(j��)�Ĺ�����(sh��)�ǣ����ɿ���늙C(j��)ʹ���\(y��n)���ڹ�(ji��)�ܠ�B(t��i)��
���IJ��õ��Ǿ��l���{(di��o)���Ĺ�(ji��)�ܷ������ڿ��ƅ����ϣ����õ�����늉������֮�g��λ��������ƅ����Ĺ�����(sh��)��������
��?y��n)�늙C(j��)����������^���c(di��n)�c늾W(w��ng)늉������^���c(di��n)֮�������ӳ�ˮ���늄�(d��ng)�C(j��)�ھ��l�ܿ������\(y��n)�еĹ�����(sh��)�ǡ����ԣ�ֻҪ�܌�(sh��)�r(sh��)�y(c��)���@�ɂ�(g��)�����^��r(sh��)�̣�����Ӌ(j��)�������늄�(d��ng)�C(j��)������(sh��)�ǣ������_(d��)�����Ʈ���늄�(d��ng)�C(j��)��(ji��)��\(y��n)�е�Ŀ�ġ�
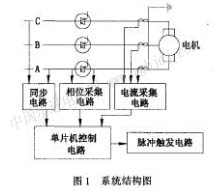
3����ϵ�y(t��ng)��Ӳ���O(sh��)Ӌ(j��)
����늄�(d��ng)�C(j��)�̑B(t��i)��(ji��)�܆���(d��ng)����ϵ�y(t��ng)�Y(ji��)��(g��u)�D��D1��ʾ������ƾ�·��8098��Ƭ�C(j��)ϵ�y(t��ng)��ͬ���·���}�_�|�l(f��)�(q��)��(d��ng)�·������z�y(c��)�·����λ�z�y(c��)�·�ȽM�ɡ�
3.1ͬ���·
ͬ���·���Æ���ͬ����ʽ�����қ]�ІΪ�(d��)�O(sh��)��ͬ��׃��������ͬ����̖(h��o)ȡ���Դ׃�����ό��T�O(sh��)Ӌ(j��)��ͬ���@�M�������Դ׃������ͬ����̖(h��o)��(j��ng)��lm339�M�ɵ��^����^��׃?y��u)����ڞ?0ms�ķ�����̖(h��o)����(j��ng)�^�����������x�͵�8098��Ƭ�C(j��)��hslo�ˣ���ԃ��hsi���P(gu��n)��fifo��������У��Ϳ��ԫ@�Ü�(zh��n)�_��ͬ���r(sh��)�̡�
3.2�}�_ݔ���·
�}�_�Ŀ��ƽǼ��}�_������8098��Ƭ�C(j��)�ĸ���ݔ��ͨ��hso.0 - hso.5���ƣ��}�_�|�l(f��)�(q��)��(d��ng)�·���ßo�}�_׃�������(q��)��(d��ng)��ʽ���@�N�}�_ݔ���·�Y(ji��)��(g��u)��(ji��n)�Ρ�
3.3�����λ�z�y(c��)�·
�ھ��l��δ��(d��o)ͨ����r�£��������ָ�������ֹ�r(sh��)�̜�����ͬ��늉��^��r(sh��)�̵ĽǶȡ���ϵ�y(t��ng)����2��(g��)����(li��n)�ھ��l�܃ɶ˵Ĺ��������ɼ��������ֹ�r(sh��)�̣���(d��ng)���l�܌�(d��o)ͨ�r(sh��)������������㣬�����������O�܃ɶˉ������ƞ������ֹ�����O�܂�(c��)ݔ�����ƽ����(d��ng)���l�ܽ�ֹ���������r(sh��)�����������еĶ��O�ܳ���������(d��o)ͨ�����O�܂�(c��)ݔ�����ƽ��ԓݔ����̖(h��o)��(j��ng)��8098оƬ�еĸ���ݔ���hsl1�Ԅ�(d��ng)ӛ���̖(h��o)�ɸߵ��͵��S׃�r(sh��)�̣���������������(du��)��늉�����λ����ǡ�
3.4����z�y(c��)�·
��������ʽ�����·�У����ڽ�����(c��)�������Чֵ���cֱ����(c��)�������·����֮�g������һ���ı����P(gu��n)ϵi=0.816/d����˜y(c��)��������(c��)������Ϳ��Է�ӳ��ֱ������Ĵ�С�� |