ƽ��ֱ�Ƕ�λϵ�y���·�OӋ
�� ÷ �����d �S���(�����V�I�WԺ710054)
ժ Ҫ �OӋ���Բ��M늄әC�τӞ���ĵ�ƽ��ֱ���ԄӶ�λϵ�y�·�����а�����Ƭ�Cݔ���ӿھ�·�������Ͼ�·���Ӿ�·��ֱ��늉�Դ�·�ȡ��ɾ��_�Ĵ������h�η�����������߉�������D�����T�M�ɵIJ��M늙C�������t��Ӌ��Cܛ����������Y��������ϵ�y��Ӳ����·���Σ����ɔ_��������ϵ�y�����_���OӋҪ��
�� �~ ���M늄әC��λϵ�y��Ƭ�͙C
1 ����
ƽ��ֱ���ԄӶ�λϵ�y�V���������^�̿��Ƶĸ����I���M늙C�τӵ�ƽ��ֱ���ԄӶ�λϵ�y����Ҫ���c1���܌��F���_��λ�����_��λ���o�e���`���һ�㑪�����y���^��Ҫ�ȸߵ��L�D�C�ؙC����ϵ�y�С���Ƭ�C���ƵIJ��M늙C�τ�ƽ��ֱ���ԄӶ�λϵ�y����Ҫ���c����ܛ������ɾ��_�Ĵ������h�η�����������߉�������D�����T�M�ɵIJ��M늙C���������@���H������Ӳ����·�������˳ɱ������Ҵ�������ϵ�y�Ŀɿ��ԡ�
ϵ�y���ò��M늙C��90bf003�ͷ���ʽ���M늙C�����������࣬�����1. 50/30��ֱ��늉�60v�������5a��****�o����1. 96nm��****���d�����l�ʞ�1 500hz���\���l�ʞ�800hz�����䷽ʽ������6�ġ�
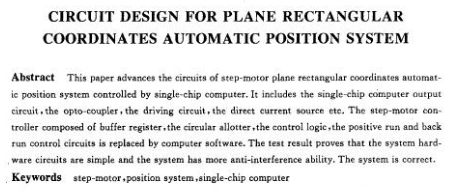
ϵ�y�Ĺ����^���Ǐ��I�Pݔ�붨�c����(x��y)��ܛ������x늙C��y늙C���D�ӷ����D�Ӳ��������_��ƽ��ֱ���ԄӶ�λ��Ŀ�ģ�Ҳ����ʹ늙C���D������ԭ�c��ֱ��늉�Դ�ϵ�y��Ӳ����·�Ɇ�Ƭ�Cݔ���ӿھ�·�����·���Ӿ�·��ֱ��늉�Դ�·�����M늙C��ؓ�d�M�ɣ��D1��Ӳ����·��D��
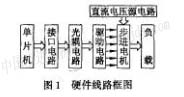
2����Ƭ�Cݔ���ӿھ�·���OӋ
��Ƭ�Cݔ���ӿھ�·��D2��ʾ����Ƭ�C����8031оƬ���ӿھ�·�в���8255��a�ڞ�ݔ���ڣ�pao��pa2��x늙C�����࣬pa4��pa6��y늙C�����࣬b�ڡ�c�ڞ�ݔ��ڡ�
3 ���·���OӋ
�D3���Ƭ�C�c늙C��һ����B�ӈD���D�й�늸��x�·��Ŀ���Ǹ������·�c��Ƭ�C֮�g��ϵ������һ�����·�l��������ɹ��ʷŴ����еĸ��ƽ��̖�M���Ƭ�C��������������ˣ��������c��Ƭ�C֮�g��һ����4n25����ҪԪ���Ĺ�늸��x�·���Ķ������ϵ�y���ɔ_��������
4 �Ӿ�·�OӋ
���Ӿ�·�������ʷŴ��·���У������_���D��tip122�������·����Ҫ��������pa=1�r���l����O�ܲ��l�⣬��˹������O�ܽ�ֹ���_���D��tip122��ͨ��a������@�Mͨ늡���֮����pa=0�r���������ʹ�l����O�ܰl�⣬�������O�܌�ͨ���_���D��tip122��ֹ��a������@�M��ͨ늣���D3��ʾ��
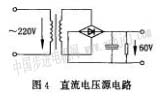
5ֱ��늉�Դ�·
ֱ��늉�Դ�·��Ҫ����ufz= 60v�� ����������x��bp82���V�����c=4 700uf��r-120��
ֱ��늉�Դ�·��D4��ʾ��
6 ������OӋ
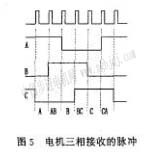
ϵ�yܛ���OӋ����Ҫ�΄��ǣ��Ľ��յ�ƽ�������c��ֵ�Д�늙C�����D�������l�������}�_���Д�늙C�Ƿ��\������λ�c�����_늙C�Ŀ�����ȫ��ƣ�늙C���D�Ŀ����}�_�ǣ�a-ab-b-bc-c-ca�����D�����}�_����c֮�෴���a���r���}�_�ķ������� |