צ�Oʽ���Ų��M늄әC�o�D�ص�Ӌ��(2)
�ģ� �� (�ؑc늙C�S400043)
4�o�D�ص�Ӌ��
�c�������M늄әCһ�ӣ�צ�O���Ų��M늄әC�o�D�ص�Ӌ�㣬ҲҪ�ĵ�ֵ��·�����]���я��s�����S�ň���Ӌ�㻯���ֵ��·���k������·��
�ڑ��õ�ֵ��·���r�������@�ӵļٶ���
���F�ĵČ�����
�ں����F���еĜu��Ч����
�۶����@�M�Ĵń�ȫ�������D�Ӵ���ϡ�
4-1��ֵ��·
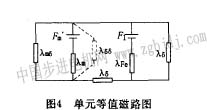
�����ڈD1��ʾצ�O���Ų��M늄әC�ĽY���������䌦�Q�ԣ���2�����ӷքe�M�ɵĴ�·������������ֻҪ�о���һ������һ��צ�O�ڃȵ�һ���ņ�Ԫ�Y�������ˡ��ĈD1�п��Կ��������^ԓ��Ԫһ���O�°낀�O��Ć�Ԫ��ֵ��·��D4��ʾ��
�D4��ʾ��Ԫ��ֵ��·�ஔ��һ��������ԾW�j���ń�Դ��f��fi���քe��ʾ��䓵�Ч�ńݵ�һ��Ͷ����@�M�ńݡ�
һ���O�°낀�O��Ě�϶�Ō���צ�O�F�ĴŌ�����©�Ō�����䓃ȴŌ��ʹ��©�Ō������К�϶�Ō��S�D��λ�ö�׃����������Ԫ��ֵ��·�D�Ľ⣬�ɑ����·�ĵ���ԭ����
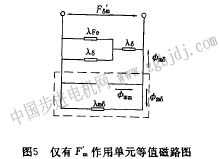
(1)�H��fm����
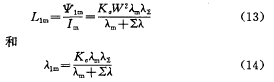
�@�r��Ԫ��ֵ��·�D��D5��ʾ��
�ⲿ��·�鿂�Ō��Ɍ��ɣ�
ʽ(5)�ɸČ��飺
�ɴ˿������䓰l���Ŀ���ͨ��Ҳ�����ⲿ��·�Ŀ���ͨ����
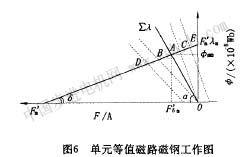
�ⲿ��·�Ĵńݽ�fk�����ɴ�䓵Ĺ����c�Q������˱�횽o����䓹����D����D6��ʾ��
�ɈD6��tan= - ea��б����һֱ���c��䓃ȴŌ�k=tan��ֱ���ཻ�����ca�����䓹����c��
�ɹ����ca�����Եó���ͨ�c�ńݵ��Pϵ�飺
��ʽ(7)������ʽ���t�ⲿ��·�Ĵńݽ��飺
��Ҋ����϶����ͨ��
������ͨ����ȫ����צ�O����朶����@�M�������в���©�ţ����䮔צ�O�F��͕r�������@�����H��������ͨ��
���@�N�����£�����c�����@�M�Ļ���朞飺
����c�����@�M�Ļ��м����Ō��քe�飺
ֵ��ע����ǣ��S���D��λ�õ�׃������϶�Ō�Ҳ�S֮׃�������ⲿ��·���Ō��_���Ĵ�䓹����cҲ��ijһ������׃������D6��b��c���c�����������@�Mͨ늺�����늘з����Ĵ���ʹ��䓹����c���ڸ���ķ�����׃������D6��d��e���c��
d��e���c���_��Խ����׃��Խ���@Ҳ�f������������õ�ҲԽ��֡���䓹����c���OӋ�ڴ��ܷe****��һ�c�Ϟ�****��
��צ�O���ӽY����������������Ҫʹ��䓵�ƽ�������c������϶�Ō��㶨����k���_�����ⲿ��·���Ō���k�c�ȴŌ�xmֱ���� |