���ʽ���M늄әC�@�M늸е��о�(1)
�� ��(�㽭��W����310027)
ժ Ҫ ���ú����žW�jģ�ͣ���������ʽ���M늄әC���@�M��늸��Լ��@�M�g�Ļ����M�л��A�ķ�����������ʹ�ں�����r���X�ӴŌ��H���к㶨�����������������Ҟ龀�ԕr���@�M늸�Ҳ���Ǻ㶨ֵ���c�D��λ�����P�����@�M�g�Ļ���Ҳ�����㣬Ҳ���S�D��׃����2���C�������������^�̽�ʾ��늸кͻ����S�D��׃���ęC�����c�S�������ͨ�������P��
�� �~ ���M늄әC�@�M늸л���
1 �� ��
���ˌ����ʽ���M늄әCϵ�y�ĸ���\�І��}�M��������о����o늄әC������������ϵ�y�ă����OӋָ�����������_�ķ���ģ����һ���Ҫ�Ļ��A�о�������߀�кܶ��Ҫ��[2]�����У�늄әC�@�M��늸��������Ҫ�ą��������Ĵ_�����c���_���Ǐ��s�����ʽ���M늄әC��ϵ�y�ĽY�����\�з�ʽ���^�����⣬����Ҏ늙C�ĽY�����\�з�ʽ�ó��ĸ���ֱ�����ã������������e�`���J�R��
��ˣ������ʽ���M늄әC���@�M늸���һЩ���A �c�D��λ�õ��Pϵ�ȣ���늸�ģ�����Mһ�����_���ķ���ʮ�ֱ�Ҫ��
2 �����žW�jģ��
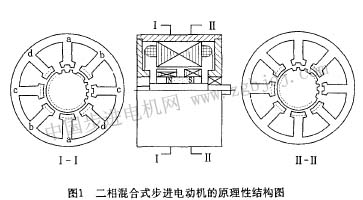
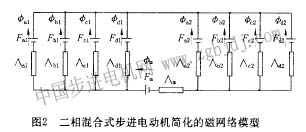
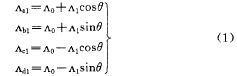
���ďĺ����ĴžW�jģ�ͳ��l���þ��Է��� �ķ��������@�M늸��������ķ������ó�һЩ����Ļ���Ҏ�ɣ�����늸С������c�X�ӴŌ��������Pϵ���Ե��ͽY���Ķ���8�O���ʽ���M늄әC�����M��ӑՓ����ԭ���ԽY����D1��ʾ�����������Ҋ����������ĴžW�jģ�ͣ�ģ���к����˶��ӘO�g��©�š������w��©�Ż�·��������S��ܗ����·�Ĵ��衣�@������������Է����ĽYՓ��ԭ�t�Ե�Ӱ푣������������]�rҲ�]��ԭ�t�Ե����y������8���O�У���һ�lֱ����������2���ŘO늴Š�B��ȫ��ͬ�����Ժϲ����@��늙C��ÿһ�˃H��4�l֧·����D2��ʾ.�D�������O�ϵĴńݣ�������ֵ���@�M�ȵ����ֵ���@�Mÿ�O�є����������Q��. ���X�ӴŌ���aa2��ab2��ac2��ad2�t��(��)���F�Ķ��� ֻ���D�������w�a���Ĵ�ͨ���D2������һ���ε�ֱ���O���X�ӴŌ����@Щ�Ō����������D��λ�ýǵ� ����·�����y�ó������w֧·�Ĵ�ͨ�飺�����Ժ��������D���X����׃�����ڡ�
��n��ʾÿ�O�@�M���є������������O�XȦ�Ľ��@���B�ӣ��ɵõ�a���b���@�M�Ŀ���朞飺
am�������w ��ăȲ��Ō���f�������w�Ĵńݡ�
���ˣ����D��С�X���ľ��c���������g�ĊA�DZ�ʾ�ǿ��]�����w�Ȳ��ʼn�����ϵ�������a���D�ӵĽ�ʹ�ã���D3��ʾ����Ӌ�����ԴŌ������� �Ȳ��ʼn�������ȫ�������ⲿ��·�Ĵʼn��½����ⲿ��·�Ŀ��Ō���2ao��һ���F��4�l֧·�Ŀ��Ŵʼn��½����l��֧·�Ĵ�ͨ��
�μ����ϸ����C���������ҽӾ��Կ��]�r���ɵã�
(��)���D���F��������(i)���eλ1/2�X��
3�����@�M�������
�������w����һ����Ч�Ą���@�M���t��Ч����@�M�c�������@�M֮�g�Ļ��О飺
|