���ʽ���ʲ��M늄әC���������·
������ �O�Y��(�����I���I��W150001)
��ժ Ҫ�����������ͻ��ʽ���M늄әCĿǰ���õ�buck�����l�����Ӻ͆�늉���۔ز��ӃɷN��ϵ�y�\�е����ԣ������һ�N���l�����ͣ�pwm�������ز��ӷ�ʽ���@�N�������·��Q���@�ɂ�ϵ�y��ƽ�����c�����Ե�ì�ܡ����нo�����·�������OӋ���������Y����
l�� ��
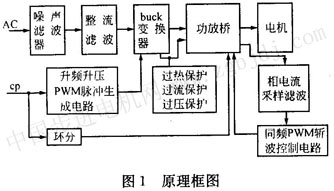
�����ͻ��ʽ���M늄әC��һ�����@�M����^���m�˲��ô���������Ⱥ��ε����·��Ŀǰ���õ���Ҫ��buck�����l�����Ӻ͆�늉���۔ز��ӡ�����buck�����l�����ӷ�ʽ�r�����Ř��늉����Scp�}�_�l�ʵ�׃�������l�r늉��ͣ����@�M������ε�ǰ������׃���^ƽ����늙C�D�����µķ���ƽ��λ���\�ӵ��^�_С����]���^�_�����ٶ���Ӳ����@�����F���\�Dƽ������С��������һ���棬buck�ͽ����������·�к���һ��lc��ͨ�V���·��Ŀ���ǞV���d��������ʹ���ż�Ҳ���@�M��늉�����С������ԓ�V�����Ď������ޣ�����ͻ׃Ӎ̖���^���˥�p��ʹ��ϵ�y��푑��ٶ��^������ʹ�O�������l�ٶ��^�����Լ������l���^�͡���۔ز��ӷ�ʽ������ֱ�ӌ���۔ز�����һ���V���h�������ϵ�y��푑��ٶȿ죬�O�������l�r�g�̣������l���^�ߡ����������ڵ����\�Еr���Ř�Ҳ�Ǽӵĸ߉���ʹ���@�M���׃���ӿ죬�D���\���^�_�Ӵ��ٶ�������@�����F���\�Dƽ�����^������������ό��ɷN��ͬ�ӷ�ʽ���c�ķ��������@���F��ϵ�y�Ŀ����Ժ��\��ƽ���Ե�ì�ܡ�
���Č������ɷN�ӷ�ʽ�����c�Y�����������һ�N�µġ����l������pwm�������ز��ӷ�ʽ����ԓ�ӷ�ʽ����к��������ƣ����Թ��ż���늉��S�l��������һЩҲ���������^��������l������һЩ���@�M�����׃��(ǰ����)�ӿ죬늄әC�Ŀ�������ߣ���ƽ�����½����Ķ����Ը���ϵ�y�����Č��HҪ���{�����l����������ʹ�üȝM��ϵ�y�����Ե�Ҫ�����\�D�^��ƽ����ͬ�r�����ں��������ƿ��������D�ӽ��ٶȲ��������@�M������ӣ�Ҳ�����ڸ���늄әC���\�����ԡ����ӷ�ʽ�ĺ��������ֲ��ø����@�Mͬ�l��ͬ��λ��pwm�ز����ƣ����������@�M��Ϯa������Ӎ̖�������늴�����ԓ��ϵ�y�Y�����Σ�����ģ�K�����{ԇ�O�鷽�㣬�F�ѮaƷ�������Ľ�B�ɹ�����ŷ����g�С������a��������130��200�C�����D�ص����ࡢ����;�����ʽ���M늄әC��������ԭ�����OӋ���c��
2������ϵ�y�Ĺ���ԭ��
�D1��ʾ���l����pwm�������ز����Դ��ԭ����D�����M�}�_Ӎ̖ݔ�룺һ·���h�η���������ݔ��ֱ�ӿ��ƹ��Ř���_�PԪ����ʹ���M늄әC��ͨ늠�B��һ����߉����D�Q����һ·�����l����pwm�}�_�����·����ݔ��pwm�}�_��ռ�ձ�d��cp�}�_�l�ʵ�ijһ�����������Pϵ������늄әC�����Ե�Ҫ��͌��\��ƽ���ԵĿ��]���Դ_����ԓpwm�}�_����buck׃�Q��������ݔ�����ǹ��Ř�Ĺ���늉������Ř�����Ҳ̎��pwm�ز����Ơ�B��ʹ��������ژO��ֵ(���~��ֵ)�����ȡ������@�M�·��늉������l�����ĺ����_�������Ԟ������늄әC�����\�����ܶ���߹��ż���ȫ��ͨ늉��r��Ҳ����Ӱ�늄әC�����\�е�ƽ���ԣ��������@�M����������ƣ��������l�����ĺ��������m���{����늉��������Կ�һЩ��Ҳ���������^�����ֻ��Ӱ�������ε�ǰ���أ�ʹ���׃�����٣�늄әC�ĄӑB푑����ơ�
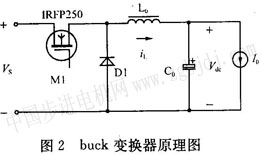
3 buck׃�Q���������OӋ
buck׃�Q�����·�Y����D2��ʾ���_�P�ܿɸ������Ř���Ҫ���늉��������ṩ������Ĵ�С�x�����D�Ќ�����׃�Q��ؓ�d�Ĺ��Ř��늄әC��Ч��һ�����Դ����io��ʾ���V��늸�lo�͞V�����co��ֵ������ϵ�y�Ĺ�����һ����Ӱ푣����Ԍ��䅢�����x���^����Ҫ��
�īI1ᘌ��Բ��M늄әC��ؓ�d��buck׃�Q�����o��l����co��Ӌ�㹫ʽ�����J��lo����ȡ��ʹ�·�������B�m���ģʽ�£���lo��ֵ����������ȡ���R��늸С����Dz��M늄әC�Ŀ������ռ�ձ��S��ؓ�d���\���l��׃����������R��늸б��в�ֵͬ������ijһռ�ձȕr(����ijһ�\���l��)��һ****늸�����ȡԓ늸����r���V���h���đT��ƫ�a���������Ӱ푣�һ��Ӱ푄ӑB�\�����ܣ�ʹ���Bݔ����푑��ٶȶ������½������nj���ʎ��Ӱ푣�늙C��ʎ��Ҫ���������r����늸����^�������ă����S�r�����ṩ���ЕrҲ��������ʎ�ӄ��������ڹ������γ�ԓ늸б��^���y��һ�����****늸����ľ���늸У��������F���w������Խ����γ�ԓ늸У��@�c���M늄әCҪ����l�r�T�ԭh���pС�� |