****���ظ��S�Ļ��ʽ���M늙C�C����ϵ�y(t��ng)
�O���x(�㽭���I(y��)��W����310014)
��ժ Ҫ������(j��)���ʽ���M늄әC���\�о��l���ԣ��ƌ���һ�N����****���ظ��S�Ŀ��ټӜp���㷨��ͬ�r�o�����m���C���F(xi��n)����ʽ���������㷨���C���F(xi��n)��Ӳ����ܛ�����g(sh��)�������ìF(xi��n)��ԇ��hdj003ƽ���P(gu��n)��(ji��)���b��C���˵đ��ã��C���㷨�����_���Լ�ܛӲ���OӋ�ĺ����ԡ�
l�� ��
���ʽ���M늄әC��������\���l�ʸߡ��ӑB(t��i)���ش���С���\�D(zhu��n)ƽ��(w��n)�����������ġ���λ���Ⱥͷֱ��ʸߵȃ�(y��u)�c���яV���������T�电(sh��)���b�á��Cе�֡��̘I(y��)�C�����Ԅӻ��x����ӡˢ�����b�ӹ��Ͱ��b�O�䡢܊���b��șC�һ�w���a(ch��n)Ʒ���O���У��c����ʽ���M늄әC��ȣ����ʽ���M늄әC���и����õĸ��l�\�����ܣ���****�\���l�ʸ��_50khz���ϣ��D(zhu��n)���_6 000r��min���ڌ��H�����У����˳�������䃞(y��u)���ӑB(t��i)���ܣ����ȱ�횽�Q���P(gu��n)�I���g(sh��)��Ҫ�к����ļӜp���^�̣������^�������l���ƣ����Ӝp���^�̲��������p�t���F(xi��n)�G�����������ٕr�g���L���tݔ�������_�����OӋָ�ˣ������h�_����50khz��늙C�OӋ���l���ܡ��mȻ���P(gu��n)����ʽ���M늄әC�������l�о������S������������ʽ���M늄әC�������l���}�hδ�õ��A�M��Q�������ڼ����^���У������������S�l�����߶�׃С�ģ����߳ʇ��طǾ����P(gu��n)ϵ���Ҳ����ܵõ���������(sh��)���_ʽ���ټ��ϑ���������Ҫ��ְl(f��)�]���ʽ���M늙C�ĸ��l���ܣ����`�C����ֱ�ӑ����īI2��7�еĽY(ji��)�������M�������������������ƽ������ڵ��l�������ڸ��l���@Ȼ���m�ϻ��ʽ���M늙C�����ڸ��l�������c�l���P(gu��n)ϵ�ć��طǾ��ԣ��Æ�һ��ʽ�������l������Ҳ�Dz������ģ������ڲ��M늙C�ĽY(ji��)��(g��u)���(q��)�ӷ�ʽ��ؓ�d��ʽ�����ض���Ӱ푾��l���ԣ���ˣ����^���Ӻ�****���ٵĽy(t��ng)һ��(y��u)���������������ڸ����صIJ��㡣���ڻ��ʽ���M늙C�����\�е����c���������ļӜp��Ҏ(gu��)�ɡ����s���㷨�Լ����|(zh��)����Ӳ���OӋ���������_�������\�У��������������ٵ�ʧ�������ĸ���(j��)���ʽ���M늙C�ĽY(ji��)��(g��u)����(sh��)�����Ӽ��\�о��l���ԣ��o��һ�N����****���ظ��S�Ļ��ʽ���M늙C�Ӝp�ٿ����㷨��ܛ����������8086cpu��pal�c82c54��(g��u)�ɵ�Ӌ��(sh��)����8259�Д�������ȽM�ɸ�����Ӳ����·���Ԍ��F(xi��n)���ʽ���M늙C��****���ؿ���ƽ��(w��n)�Ӝp�ٺ��l�\�У����Ҿ����ஔ�ߵĶ�λ���ȡ�
2�����㷨
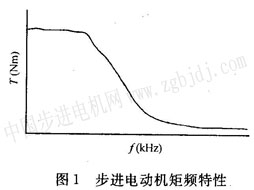
���ʽ���M늙C�ĵ����\�о��l������D1��ʾ���D1�������ڵ��l��(һ��2khz����)�����ʽ늙C���^�ߵ�ݔ�����أ��Ҿ��l�����^Ӳ�����l�ʴ���2khz��ݔ�������S�l�ʵ����߿����½���
���l�ʸ��_һ���̶Ⱥ��䌦�����ص��½��ʄt�����pС�����`�C�����ڵ��l�Σ����ʽ���M늙Cֱ�����ӣ����ܱ��C****ݔ�����ء����l�����ߕr���鱣�C****���أ���횝M�����D(zhu��n)�w�Ą����W���̡�
ʽ�� tm����늙Cݔ���D(zhu��n)��****ֵ
t1������ؓ�d�D(zhu��n)��
j����늙C�D(zhu��n)�Ӽ�ؓ�d�Ŀ��D(zhu��n)�ӑT��
�ȡ���늙C�D(zhu��n)���D(zhu��n)�^�ĽǶ����O����Ǟ�ko���t
�Ķ���
���O�����^�̏��\�о��l����������ij�cpi(fi,ti)��(j��ng)С�Ƅӵ��_pi+1(fi+1��ti+1)���@��fi+1=fi+��fi����fi,ti+1=ti+��ti,��õ���pi��pi+1�ľ��l���ԣ��ɸ���(j��)pi�c���ڈD1�����ϵľ��wλ�ã���(j��ng)�^һ������������������ߴ�����������ָ��(sh��)�����ĔM�ϵõ������ஔ���ȵĽ������������ƌ��������ˣ����ЃH�o������һ�������ƽ��ĽY(ji��)���������s��r��ͬ����ơ�
�ɼ��O�����ɵõ�pi�cpi+1���ľ��l���ԡ�
ʽ��
���O��=-kfi+ti���t��ʽ(3)��ʽ(4)��֪��
ʽ(5)���鲽�M늙C����****���ظ��S��횝M��ļ��ٶ��c�l�ʵ��P(gu��n)ϵ�����c�������ٕr�̵����ء��l���Լ������������P(gu��n)�� |