���ʽ���M늄әC����Փ�����OӋ���c
������������늙C�о�����
��ժ Ҫ�������Ԍ��ȷ�ʽ�����˻��ʽ���M늄әC�c����ʽ������ʽ���M늄әC�IJ����Փ�����ʽ���M늄әC����Փ���A�ϣ���������϶�ň������S���϶�ň����OӋԭ�t���������ʽ���M늄әC�Č����o�B�D��Ӌ��ʽ������������ʽ���M늄әC�������o��****�D���F���L���o�D�ص��OӋֵ��ԇ�ֵ��
�����}�~�����ʽ���M늄әC����Փ���������OӋ���D�ӣ��F�ģ��L�ȣ��o�D��Ӌ��ʽ
1 �� ��
���M늄әC�ǽ��������_�l�����ձ鑪�õ�����늄әC���Ĺ����υ^�֣��з���ʽ���M늄әC������ʽ���M늄әC�ͻ��ʽ���M늄әC���@����M늄әC�aƷ�lչ�v���Ƿ���ʽ������ʽ���ȣ����ʽ�ں��ڷ���ʽ������ʽ���M늄әC���ĬF��Փ����������������Փ���AՓ���������OӋӋ���cԇ���Ǻ�һ�£����a�����ѻ������͡����ʽ���M늄әC�lչ�����t�����@�c���Ų��ϰlչϢϢ���P������������N�߳C�B��ϡ�����wӿ�F�����M�˻��ʽ���M늄әC�İlչ�����ĽY�����a���H�������ʽ���M늄әC�c����ʽ������ʽ���M늄әC�ڻ��������M�б��^�f���Ļ��A�ϣ�Ԕ�IՓ�����ʽ���M늄әC����Փ���A��������������OӋԭ�t���OӋ���c��
2��Փ����
����ʽ���M늄әC�Ĺ������A�ǻ��ڶ��Ӵň��a���ķ����D�أ��o�D�غ������_ʽ��
ʽ(1)��ʾ����ʽ���M늄әC�ǻ��ڷ������أ��������أ������ģ���˚�϶�ɂȵĶ����D�ӱ��������OӋ���X�۽Y����ʹ��׃����****����ʽ(1)�ɵó��������D���X�ӳߴ�_��֮������ʽ���M늄әC���o�D�������ڶ��Ӵň��ښ�϶�еĴʼn�����늙C�F���L�ȵij˷e��
����ʽ���M늄әC�Ĺ���ԭ���ǻ��ڶ��Ӵň����D�����Ŵň��Ļ������ã��o�D�صĺ������_ʽ��
��ʽ(2)��Ҋ������ʽ���M늄әC���o�D�����ɶ���늘дň����D�����Ŵň��������îa����ͬ���D�ء�����䓲��|�͎γߴ�_��֮�����o�D�������ڶ��Ӵň��ʹ�䓴ň����F���L�ȵij˷e��
�C���������ڹ���ԭ������·��B���D��Ӌ��ȷ��棬����ʽ���M늄әC�ͬ����ʽͬ��늙C������ʽ���M늄әC�ͬ����ʽͬ��늄әC����ͬ���c�����D���c�����F���L�ȳ����ȣ����eֻ��ͬ��늄әC�Ķ��Ӵň����S�Դ�l��ͬ�������D�ň��������M늄әC���Ӵň����Sͨ��}�_�l�ʵ��A�S���D�ň���
���ʽ���M늄әC������ԭ����ͬ�ڷ���ʽ���M늄әC��Ҳ��ͬ������ʽ���M늄әC�������ܺ������������ʽ�ͷ���ʽ���M늄әC�Ļ�ϣ����ڻ�����ͬ����·Ӌ�㡢�D��Ӌ�㶼������������ʽ�ͷ���ʽ���M늄әC�����P��ʽ�����ڴ�·��B���ň����á��ň�֮�g�Pϵ�ȷ����������������c��
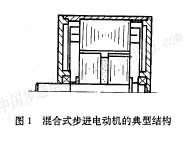
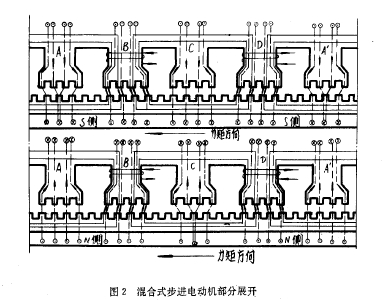
���ʽ���M늄әCͨ�������ࡢ���࣬��Y����D��ʾ���D�����������ʽ���M늄әC�ĽY����
�X��Ƕ��Ȧ���D���ɶ����e�����g�Aһ�K
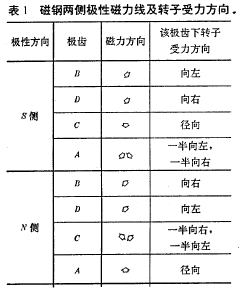
�ɈD��Ҋ�����ӽY���c����ʽ���M늄әC������ͬ�������F�ķֳ�8���O�X���O�X����С �h�δ�䓣��D���F��Ҳ��С�X����䓃ɶ��F�Ļ����e�_�낀�X�ࡣ����S���š����f�����㣬����������չ�_����D2��ʾ���D�����沿�֞���s�O�Ԃ����棬���沿�֞��n�O�Ԃ����档�F�O�����D���X̎�ڈD2��ʾλ�á��D��̓����ʾ��䓮a���Ĵ�ͨ��������ʾ��Ȧ����a���Ĵ�ͨ���ȼٶ����Ӿ��D�]��ͨ������˕rֻ�д�䓮a���Ĵ�ͨ����D��̓����ʾ����䓃ɂȘO�Դ����������D�������������1��ʾ��
�ɱ�1��֪����s�O�Ԃȣ���䓮a���Ĵ����ڿژO�X��d�O�X���D���������������a�O�O�X���D����������������e�O�X��ֻ�a��������������ڢ��O�Ԃȣ�b�O�X��d�O�X���D����������� |