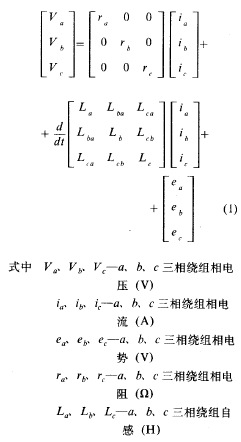
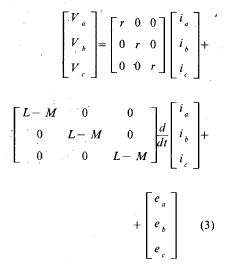
�tʽ(1)׃?y��u)?/div>
�������(2)��
늴��D(zhu��n)�؞�
늙C(j��)���D(zhu��n)���\(y��n)��(d��ng)���̞�
�����ƌ�(d��o)늘��@�M��늄ݵ�Ӌ(j��)��ʽ���麆���������ٶ�
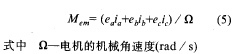
a��늘Ќ�(d��o)�w�B�m(x��)����ֲ���늘б��棻
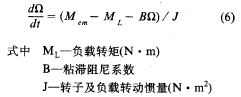
b��늘��@�M�����࣬60�������ֲ���
c�������X�۵�Ӱ푡�
�O(sh��)늘Ќ�(d��o)�w�͚�϶���ֲܷ�������(du��)λ���P(gu��n)ϵ��D1��ʾ���D�ЃHʾa����(d��o)�w����
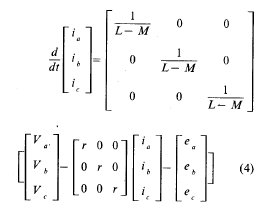
����(j��)��(d��o)�w�и�������a(ch��n)���Б�(y��ng)늄ݵĻ�����ʽ�õ������@�M��늄ݵı��_(d��)ʽ��
������õ��Ǿʵĺ���(sh��)������d0 =��dt���؞�늽��ٶȣ�����˾��wӋ(j��)��r(sh��)�Ɍ���늄ݱ��_(d��)��r(sh��)�gf�ĺ���(sh��)�����ߌ�ʽ(4)�еą��������麯��(sh��)����϶���ֲܷ��ȿ�ͨ�^�ň�Ӌ(j��)��õ���Ҳ��ͨ�^�y���õ��������@�M�S���ڿ��g�ϻ���120�ȣ��������ķ�늄��ڕr(sh��)�g��Ҳ��(y��ng)���120�ȡ�
2���挍(sh��)��
�Գ��õĶ�����(d��o)ͨ�������Θ�ʽ�oˢֱ��늄�(d��ng)�C(j��)����������(j��)��������ģ���M(j��n)�з���Ӌ(j��)�㡣�@�N������ʽ�Ę�ʽ�(q��)��(d��ng)�·��D2��ʾ��