�ŷ�늄әC�C늕r�g�������C�yԇ
�����A ���K�A�������I�C늌��ƌWУ��
o�� ��
�r�g�����Ǻ����ŷ�늄әC���ل�������Ҫ�ӑB����ָ�ˡ��r�g������ͨ�^Ӌ��ķ�����ã�����Ӱ푕r�g���������غܶ࣬ʹ��Ӌ����Ĕ�ֵ��һ������ֵ��߀��Ҫ�Ì��H�y���ķ������õ����H�ĕr�g������
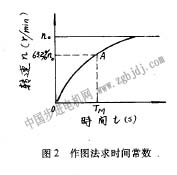
�ŷ�늙C�C늕r�g�����Ķ��x�ǣ�늙C���d����늙C�����@�M���~������늉����ļӵ�늘��@�M��һ���A�S�~������늉���̖����늙C�D�ӵ��D���_��������d�D�ٵİٷ�֮63.2����Ҫ�ĕr�g�����H��������d�D���ǟo���y���ģ�����ͬ�ӗl���µČ��H���d�D�ف�����������d�D�١��C늕r�g����һЩ���͜yԇ����������Ϳɷ֞�ֱ�Ӻ��g�ӃɷN����������늄әC�l늙C�����ù��ʾ������ֱ���ŷ�늙C�������늉����r�g��������������Dl��ʾ��Ȼ�����D�g������r�g��������D2��ʾ���@�N�������^���Σ������D�ľ��ȟo�����C���`����^���܆�Ƭ��Ӌ��C�Y�����M�ļ�����м��g���Ϳɱ��^���_�Ĝy���ŷ�늙C�ęC늕r�g���������ҿ��^�õĽ�Q�y��Ԫ���D�ӑT���c��̖ϵ��֮�g��ì�ܡ�
lϵ�yԭ����D
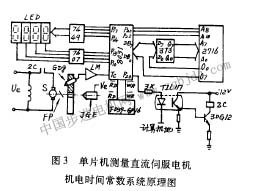
�Æ�Ƭ��Ӌ��C�y��ֱ���ŷ�늙C�C늕r�g����ϵ�yԭ��D��D3��ʾ���D�У���Ƭ��Ӌ��C����mcs-51ϵ��8031�ͣ���ӳ�����A��eprom2716���@ʾ����4λ��ꎘOled�@ʾ�Y����fd39-gp16���ʹ�ӡ�C��ԓ�ʹ�ӡ�C�����c�ɺͶ�N̎�����B�ӣ�ʹ�Æ�һ��+5v�Դ���������C֮�g����Ϣ���Ϳɲ��ò�ԃ��ʽ���Дʽ��
til117������������Á�����ֱ�����|��2c������ጷţ�ͬ�r��ֹ�����ɔ_��̖�Z���Ƭ�Cϵ�y��til117ݔ��˽ӵ��c�͆�Ƭ�Cϵ�y�ӵ��c�B��һ��
ǰ�ö��ٶșz�y�����ɼ���Դjge����늹�gdg������Pfp��֧�ЈA�P�M�ɡ�36����늹ܾ���ķֲ���֧�ЈA�P�Ϙ��ɹ�늱P���t늙Cÿ�Dһ�D����늱Pݔ��36���}�_������P��45�Ƚ��N�b��늙C�S��ˣ��䘋�����p�|���Ϙ��ɣ��t����P���D�ӑT����ȫ���Ժ��ԡ�
2ϵ�yԭ��
���ŷ�늙C�^���^����Փ��֪��늙C���D����һ�����A�ַ���
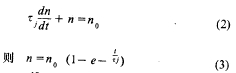
�ڴ������r�£��e���зŴ��������c늘��@�M�മ�r���ɺ��Բ�Ӌ������ʽ(1)�ɺ�����һ�A�ַ��̡�
���һ�����H�Ķ��A�T�ԭh��������һ�A�T�ԭh���� ��ʽ(3)�M�зe�ֿɵ�
��t=3�r��늙C���D�٣��ͽӽ����d�D�٣����ʽ(4)���Ժ�����
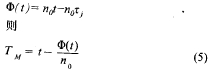
늙C�D�ٺ��}�_�����Pϵ
���������P��ʽ�����ӳ�������Ƭ�C�ȣ��ɷ�����M�����PӋ�㡣
��Ƭ�C�y��ϵ�y�ڜy���r�g����tm�r�������Ɇ�Ƭ�C�Ŀ�p20��ݔ��һ���_�P����ͨ�^��������t//117ʹֱ�����|��zc��Ȧͨ늣����|��zc���ϣ�����ֱ���ŷ�늙Cs���ஔ����늙C늘��@�M�ϣ���һ�~���A�S������̖��ǰ�ö˼����ٶȂ��в���ݔ�������D�ٵ��}�_��̖��ԓ��̖��lf324�Ŵ��ֱ���M���Ƭ�C8031��Ӌ����to�M��Ӌ��������Ӌ�����Q����������D��ֵ��led�@ʾ������ֱ���ŷ�늙C��ͬ�r����Ƭ�C�Ȳ�Ӌ�r���_ʼӋ�r�g��һֱ��to�ڜy��늙C�D�ٵ����d�D�ٞ�ֹ��ϵ�y�M���Д��B�����Д����һ�������zcֹͣ늙C����һ�����M�Д�ֵ̎���������M�ϣ����ѕr�g����tm��led�@ʾ��ͬ�r��ӡ�C��ӡ����ֵ��������