�\�ӿ��ƌ��ü����·������
�T���� (�V������ƌW�о���)
��ժ Ҫ�����Ğ顰�\�ӿذƌ��ü����·Ӳ����(�m8) (Ҋ1994�꡶늙C����2��)���mƪ����BAD2Sl0O����ʸ��̎��������;���M�ɲ��֡�����ԭ�����ڽ���늙C�����еđ��á�
�����~�������·����늄әC����ԭ�푪��
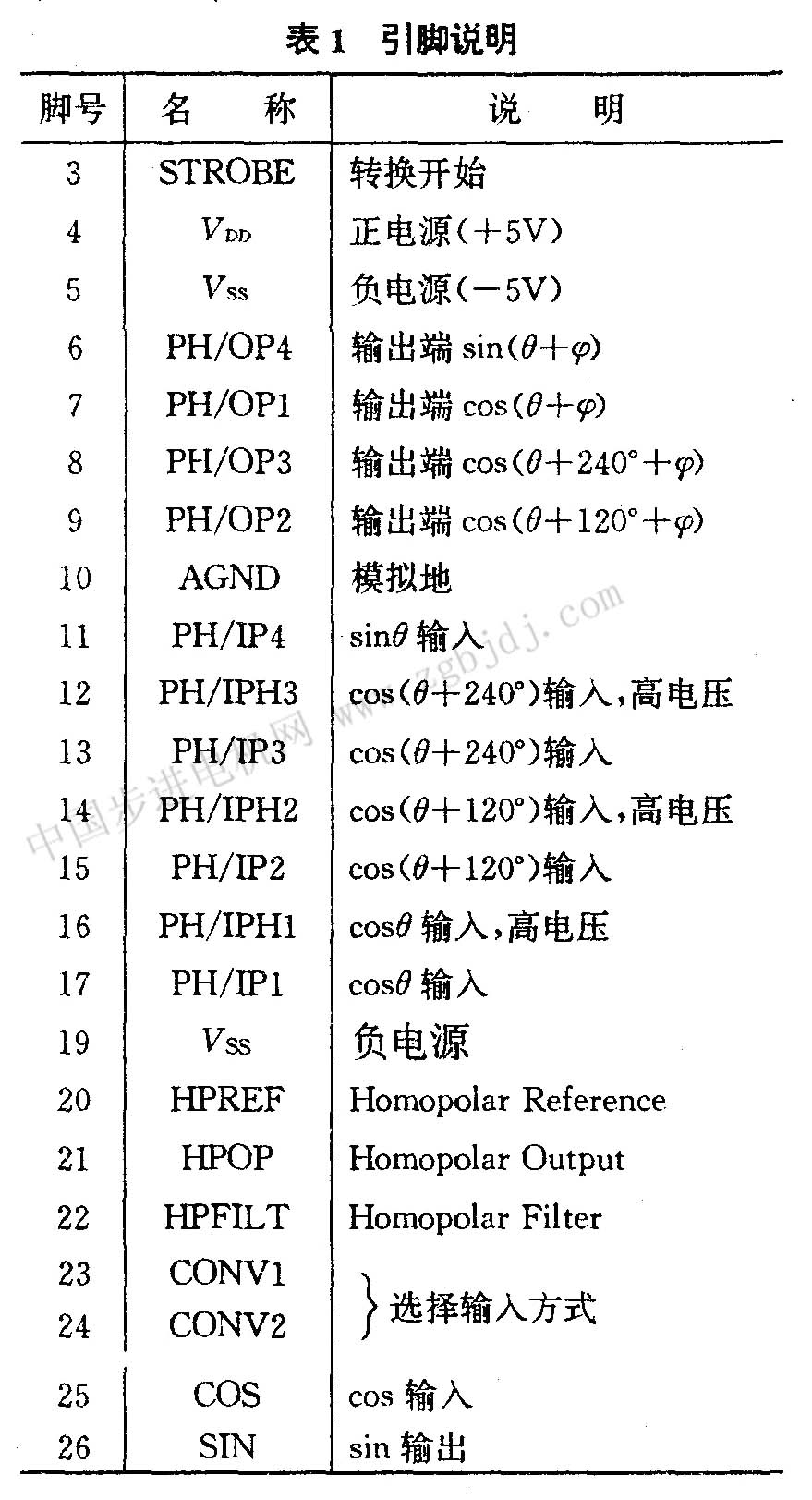
9 AD2s100����ʸ��̎����
AD2S100�����·�Ɍ��F����120�����������������̖��ʸ�����D�������@Щݔ�����D�Q����һ����ݔ��Ǧտ��Ƶ��
���
�ڱ��·�Ȱ����ЃɷN׃�Q(Ҋ�D1)����һ�N��Ӌ�������ݔ�뽻����̖�����Һ����ҷ�������ʸ���Č�����̓������������׃�Q���у�����̖�D�Q��������̖���ڶ��N׃�Q��Park׃�Q�����@�ɂ�����(��Vqs��Vds��ϵ���@��ʸ�����D����ʹAD2S100�����ڽ�������늄әC��ֱ�����şoˢ늄әC�Ŀ��ƣ�����ʸ�����ơ������m���ڸ��N���È��ϣ������ů���{���ú��L�C���ơ��C���ˡ����S�ӡ�늄���܇��ϴ�C���C�ӵȡ�ʾ)�D�Q��V��ds��V��qs���@��׃�Q�ɱ�ʾ�飺
Vds=VdscOs��-Vqssin��
Vqs=Vdssin��+Vqscos��
�@���sin�պ�cos����AD2S100��ݔ��12λ���ж��M�ƽǦՏăȲ��a������̖������Vds��Vqs����һ�N׃�Q����׃�Q���õ��µ�������̖�� ��
���·�ɽ���������̖ݔ�롢����ϵ�y�еă�����̖ݔ�������������̖ݔ�롣HOMOPOLAR OUTPuT�z������ݔ����̖�Ƿ�ƽ�⣬�����r�������㡣
9��1���b�c���_�f��
���·����44�_�ܷ�(Pһ44A)�����_(Ҋ�D2)�f��Ҋ��1������δ�е��_̖����_��ʹ���Դ��5V��ݔ����̖����늉���****��3��3V����늉���****��4��25V��ֱ����50kHz��ʸ��׃�Q��ݔ��������̖ģ���`�����ֵO��35�����Ƕ��`�����ֵ9(�l��С��600Hz�r)��
��3�_����һ��ݔ�딵���xͨ��̖��ʹλ�Ô���ͬ����������Ȳ�Ӌ��������44�_��BUSY���ƽ�r�g������ʸ�����D��׃�Q�r�g�������ֵ��2��s��23��24_�_��B�M�ϛQ����ݔ�뷽ʽ�����N�x��(Ҋ��2)��
9��2����ԭ��
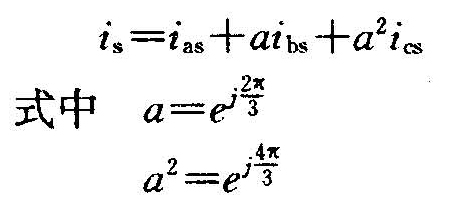
����늙C�������ʸ��is�����������Դias��ibs��ics���ʾ�飺
��Ҳ������ֱ�����˱�ʾ�飺
�ڽ���늙Cʸ�������У�ids�Q���ͨ���������iqs���D�������������ʽ��ʾ������һ����׃�Q��������AD2Sloo����D��߅��3��һ2��׃�Q������ɵġ�
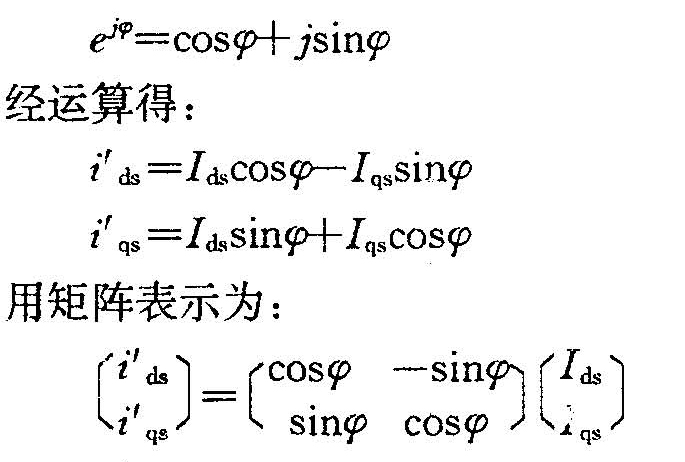
��������ɂ������Ķ�����ƣ���Ҫ������׃�Q���D�Ӆ���ϵ��ȥ���@��Ҫ�M�Џ͔��\�㣬����AD2S100���F�����D�Ӆ���ϵ�ϵĶ�������ɂ�������ʾ��ids��iqs�������У�
�@��ej���Ǻ������ӡ��մ����\���D�ӵĽ�λ��(����)���У�
����ʸ�����D�\����AD2S100�Ȏׂ��˷�����ɡ��ڷ���D��߅���M��һ��2��һ3��׃�Q��
9��3����
AD2S100�ڽ���늙C�����еđ����e�����¡�
9��3��1��������늄әC�������
|