���෴��ʽ���M늄әC�������ֵӋ��
��־�� �S�S�� ���V�|���WԺ��
��ժ Ҫ���������r����ʽ���M늄әC�����������һ�N���_��Ӌ�㷽�����Q������Ԫֱ��Ӌ�㷨��ԇ��C��������Ԫֱ��Ӌ�㷨Ӌ����������ֵ�ܱ��C����ʽ���M늄әC�нӽ����ȵ������\�У����ҿɌ��F����_���\�С�
���� �~������ʽ���M늄әC������ǣ�����Ԫ�����������
1 �� ��
���M늄әC���S�����c�����È���Ҳ�V�������������D��λ�ù��зֱ��ʵͺ��\��������ʎ�F���ȱ�c���˷��\�ܣ����c����Ч��ʩ����ʹ�������g������˦�h�ׇ������Ӽ��g���о��ܻ��S�����^���F��һЩ�����ܵ���������
���^�����Ʒ�ʽ���������Ã���ͨ늷�ʽ��ʩ�Ӳ�ͬ������ֵ����������ڲ��M늄әC�ăɂ���Ȼ��λ�c֮�g�������ɂ���λ�c����ԭ�Ѓɂ���Ȼ��λ�c֮�g�IJ���Ƿֳ����ɂ�С���������������Ʒ�ʽ�ܿ˷����M늄әC����ǹ̶������^�����β�푑����ஔ�ߵ��^�_������ʎ��ȱ�c���Ķ�����˶�λ���ȣ����С���ŷ��������ԣ�ʹ���M늄әC���c������ֱ���ŷ�늙C��⣻���ӔU�������đ��÷�����
���������Ƽ��g�������_�l���Ƹ����ܵ����������������ڲ��M늄әC���\�Еr������ȳ̶ȵ��о����������_�Ե��о���С�������_�Ե��P�I�����������ֵ��Ӌ�㡣���Č��������ֵ��Ӌ�㣬�����һ�N�µķ��������Q������Ԫֱ��Ӌ�㷨������һ����������Ե��A�ݜp�٣�Ȼ�����ԓ���ڸ����r�������ֵ����������Ԫ�����ԓ�����D�Ӯa�������ء����������λ�c̎����ϳ����ؑ������㣬�Ķ������һ���ڸ���λ�Õr�����ܮa��������ص��������ֵ��
2����ģ�ͼ����̵Ľ���
���ڷ���ʽ���M늄әC�����D���X֮�g��϶���ֵĴʼn���ռ���ńݵĽ^�֣���˶����D���X֮�g��϶���ּ����܇��ň�����׃����회�����Ԫ��������ģ�ͽ�����ԓ�^��
�Dl����һ�������X��Ć�λ�F�ĵ�Ƭ��Ȟ��Ԫ������λ��ȡ���X�����F�ă�һ���X��̎������߅���M����������߅��l����
ԓģ�Ͱ��������D���X�����X���|��λ�X���F�ĽM�ɵķǾ���ƽ�淀�����͚�϶�M�ɵľ���ƽ�淀������������������˹���̣��@�ɲ��օ^��ň���ƫ�ַ���߅ֵ��
������Ԫ�����ƽ�淀���ň��ķ����ǣ�
�����ȏĽ�����ƫ�ַ���߅ֵ���l���ҳ�һ���Q�������������ķe��ʽ�������ڝM���һ�߅��l����ǰ����ȡ�Oֵ�������ɗl��׃�֡��@���l��׃���Ǻ�ƫ�ַ���߅ֵ�ȃr�ġ����l��׃�ִ���ƫ��߅ֵ���ԗl��׃�֞錦�����늴ň���
�ڌ��������^��ָ�����ނ������Ά�Ԫ����D2��ʾ����ÿһ��Ԫ�Ȳ��������J����һ�c��⺯�����چ�Ԫ���c������ֵ֮�g�S������׃��������׃�����چ�Ԫ�И������ֵ������
3�������ֵ������Ԫֱ��Ӌ�㷨
�������ֵ������Ԫֱ��Ӌ�㷨�ǻ��ھ�������Ķ�λ�c̎����������a����С��ȷ����෴�����؞�ԭ�t������֪һ��������ֵ�������һ����ʩ�ӵ������ֵ��
�麆��Ӌ������·�M�з���Ӌ��r��ֻ���]����ͨ늕r�Ĵ�·��������һͨ����
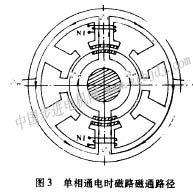
Ӱ푡�����ͨ늕r����·��ͨ·����D3��ʾ����϶���X���֣�������϶�������D���X�������D���X�����λ�X�߲����F�ģ��D3�Ю���б������϶���֣�����ʼn����˞�fgt.���F���֣��������ӘO���������D��ܗ������ʼn����˞�f fe���ɲ��ִʼn���֮�͑����ڴ�·���ń�in��ÿ�ల�ѣ�����
|