������ʽ���M늄әC������
������ ������늙C�о�����
��ժ Ҫ��������ʽ���M늄әC������Y����ԭ���ϵ������Զ����Ѓ��������ܡ����ď��cһ�㲽�M늄әC�IJ�ͬ�c���D�صĮa���C�����OӋԭ�t�ȷ���Փ��������ʽ���M늄әC�Ĺ�������������˲�ͬ������
���� �~��������ʽ���M늄әC�����ܣ��D�أ��OӋ
������ʽ����늄әC�ǽ��꼼�g���M�����_�l���ɵ����Ͳ��M늄әC���������Y����ԭ���ϵĹ������c��ʹ�����и��Ӄ��������ܣ���Ȼ�����˱��ИI�Ƽ������ߵ��dȤ����늄әC���\�л������������ԡ��OӋӋ�㡢���Դ�������о������M���˴����Ĺ�����������������������������µĘ�˼������������ʽ���M늄әC�ĸ�����ԣ����_�еر������Ĺ����������������ă���Ҏ�ɡ�
l ������
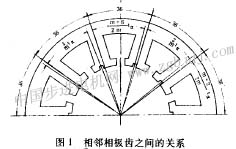
�@����ָ����������ָ������ʽ���M늄әC�cͨ�ò��M늄әC�IJ��һ��IJ��M늄әC����ij���O�X�¶����D���X�S���ص��r��������������O�¶����D���X�S�����e�_m�X�࣬m����������t늄әC�Ͳ��ܮa�����M�\�ӡ�������ʽ���M늄әC�t��Ȼ���������O�X֮�g�Pϵ��Dl��ʾ��
�ɈDl��֪�����D���X����ֲ���a���O�X�X�S�����D���X�X�S���ص��r���t���������O�X�X�S���e�_���X������l��ʾ��
������֮����һ�㲽�M늄әCÿ���@�M�a��һ���O��������ʽ���M늄әC�mȻ���Qλ�õĘO�X����һ�࣬��ÿ���@�M�a�������O����˱�l������m���xҲ��һ�ӣ��@��錍�H�����Ķ�������m=10��
������֮����һ����ʽ���M늄әC�D�Ӵ�䓃ɶ˵��F���e�_�낀�X�࣬���Ӱ���ҎҎ�ɷֲ����@�N������ʽ���M늄әC���˴�䓃ɂ��F���e�_�낀�X���⣬�����F�������O�X�ڳ�Ҏ�ֲ��Ļ��A�����e�_�낀�X�࣬��˞���ʹ��Ȧ����e��ͬ�������F�ĘO�X�ϵ�С�X�ֲ�������oҎ�ɡ�
2�D��
�S���īI�ᵽ���ʽ���M늙C���D�خa���L��Ȧ����a���Ĵň��ʹ�䓮a���Ĵň��������õĽY���������@�����ň��������îa���D�ؔ������ٻ��ߺ��w�\�����늴��D���c늙C��헅���֮�g���Pϵ�����֮�g��Ӱ������ò����ء�
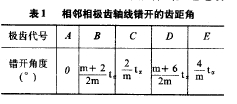
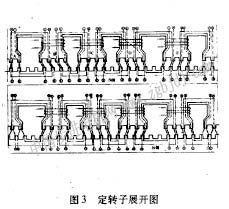
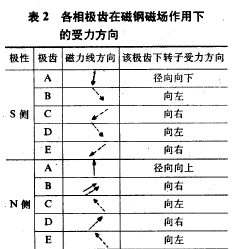
���ʽ���M늄әC�Y��ʾ�D2�����ӛ_ƬҊ�D1���F����ʮ���O�X���O�X���_��С�X�����Ͼ�Ȧ�����Qλ�õľ�Ȧ�B�Y��һ�࣬ͨ늺�a�������O����䓊A���D�Ӄ��F��֮�g�������e�_�낀�X�ࡣ���f��������Ҋ�����D2չ�_һ�룬��D3��ʾ���D�����沿�֞��䓵�s�O�Ԃȣ��������֞��䓵�n�O�Ԝy���F�O���D���X̎�ڈD3չ�_����ʾλ�ã�a���O�X���D���X�S�����R��b��c��d��e�����X�S���e�_��l��ʾ�Pϵ���ȼ��O���Ӿ�Ȧ�]��ͨ������˕r��䓮a���Ĵ�ͨ·����D3�е�̓����ʾ���@�Ӵ�䓴ň��a���Ĵ������2��ʾ���ı�2�ɿ�����s�ȵ�b��d�O�X���D���ܵ������\�ӵ�����c��e�O�X���D���ܵ������\�ӵ������෴��n��b��d�O�X���D���ܵ������\�ӵ�����c.��e�O�X�ܵ������\�ӵ������ɴ˿�Ҋ����䓴ň��a���Ĵ�������a�O�X��������������������b��c��d��e�O�X�®a���Ĵ���������s�O�ԂȺ�n�O�Ԃȷ����෴�����������μ���n�O�ԂȻ�s�O�Ԃȿ���b��d��c��e�O�X�a���Ĵ����������෴�����������ˏ�����늙C�������O�X�a���Ĵ�����̎��ƽ���B�����@�F�D�ء�
�O���δ��ţ���Ȧ��bcde��ʽͨ늣��t��Ȧ����a���Ĵ�ͨ·����D3�еČ�����ʾ�������O�X������ň������µ���������ʾ��3��
 < |