���C����늄��F���ʽ���M늄әC�]�h����
�����ɣ������࣬����
(�����I���I��W�������������I15 0001)
ժҪ���о��������C����늄���̖���F���ʽ���M늄әC�]�h���Ƶķ������������C����늄���̖�Ę��ɣ��OӋ��������λ����̖�z�y�·�����M늄әC���C����ϵ�y���ڴ˻��A��ͨ�^���Ƴ�ǰ�Ǹ���늙C���\�����ܡ�
�P�I�~�����ʽ���M늄әC���C����늄ݣ���ͬ���\�У���ǰ��
�ЈD���̖��tm383.6 �īI���R�a��a ���¾�̖��1001-6848(2000)01-0017-04
1 �� ��
���_�h����ϵ�y�У����M늄әC���\���l��������̖Դ�o���ģ�����ϵ�yؓ�d׃����Ӱ푡�������һ���̶����l�ʣ����M늄әC���@�M�����늉��c���D늄�֮�g����λ���S��ؓ�d�Ĵ�С��׃������ؓ�d�^С�r��ϵ�y���������늴������^ʣ�a���D����ʎ�������^ʣ��늴Ź��ʣ�����ؓ�d�^��r�������늴���������ʹ늴�����С�����d���ض�ʧȥͬ�������]�h����ϵ�y�У����D��λ�õ��ض���̖�����@�M�M�Р�B�D�Q���������F�_�h�\�������ڵ���ʎ�cʧ���Ć��}�����_�h�\�б������ԣ����늉��c���D늄���λ���Sؓ�d�Ĵ�С��׃����һ�N늴����������{�������Еr���ؓ�d�T�Ժܴ��ؓ�dͻ��������Ҳ����ɲ������\�С��ڲ��M늄әC��ͬ���]�h�\��ϵ�y�У���λ����̖���������D�Q��ʹ���D늄��c���늉�����λ����һ���IJ�ֵ��ͨ�^�\���ٶȵ�׃�����{��늴����غ�ؓ�d���ص�ƽ���Pϵ��������Ҫ��B�����C����늄���̖���F������ʽ���M늄әCλ���]�h��ͬ���\�еķ��������ڕr�g���t�Ŀ���˼�룬ϵ�y����̎�����`�����ؿ��Ƴ�ǰ�ǣ�����늙C���\�����ܡ�
2�C����늄���̖�ķ���
�īI[1]�����һ�N�����C����늄���̖���F���M늄әC�D��λ�Ùz�y���·������ƌ����C����늄ݵı��_ʽ���£�
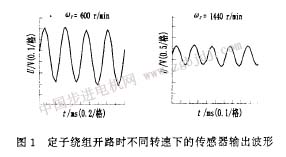
ʽ(1)�е�һ휞��D���������õĽY�����c늙C��ͨ늠�B�o�P�������Ƕ����@�M��Ůa����Ӱ푡�����am+2ao��2a4����˵���휵�8���C����ֵ��С����Ҋ����������ݔ����̖�ǃɂ���������4���C����̖�įB�ӣ����е����ҳɷ��c�����@�M�������ķ�ֵ���P���������@�M�_·��늙C���τ����D�r�������@�M�������-0ʹ��������ݔ���H��ʽ(1)�еĵ�һ헡�����һ���˜ʵ����Ҳ������ֵ�������S�D�ٶ�׃����D1��ʾ����
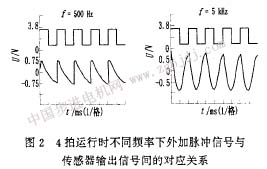
��늙Cͨ��\�Еr������im�S�l�ʵ�������u�pС��������ҳɷ���ռ�ı���Ҳ��u׃С���D2��늙C��4��4-4ͨ늷�ʽ�\�Еr����ͬ�l��������}�_��̖�c������ݔ����̖�g�Č����Pϵ���ɈD2��Ҋ�����l�r������ݔ����̖���^���c�����c����}�_��̖��������ͬ�ࣻ���l������2khz�r��������ݔ����̖���^���c��ǰ����}�_��̖r/2늽Ƕȡ����Y���C������Փ���������_�ԣ�Ҳ��늙C�]�h���ƕr��Ч��������{����ǰ���ṩ��������
3λ����̖�z�y�·���OӋ
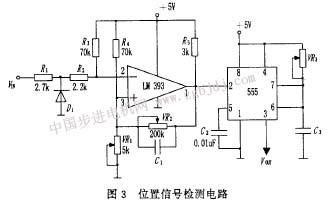
���о�Ȧ��ȡ�ķ�늄���̖����ֱ���ӭh�η��������茢���Ҳ���̖׃�Q���}�_��̖�����η��B�|�l�����κ�����λ���c�ٶ���̖�����·��D3��ʾ��
�D3���Ա��^��lm393����Ę����˾��М������ԵĆ��Դ�z���·����׃���vrz��ݔ������һ�����։�֧·�����^����ͬ��ݔ��ˣ�ʹ�^��ݔ���x�_���λ�ã����F�������ԣ��Ա�����^����ݔ��늉�ǡ�����^�㸽�����������c��Ư�Ĵ�����ݔ�����ж�����ؓ�O�ԵĘO��늉����F����ɶ��������c���{��vrz���Ը�׃�ز�Ĵ�С����Q�ز�����Ĝy�����Ⱥ�������IJ�������ì�ܡ����cl�������ݔ���ƽ���D�Q�ٶȡ����o���O��d1���ڷ�ֹݔ��С��-0. 6v���λ��vri���ڹ����^�ƽ��ֵ����pС�z���`��x��vr1��r4/10.555���r�����ɵĆη��B�|�l�·����ȥ���}�_ǰ�صĶ��ӣ��Ա���늙C�\���е��`������ |