���M늙C�ں��հl�әC����ϵ�y�еđ���
������� �����Z�Һ�����܊���չ��̌WԺ�Cе����ϵ��ɽ�|���_ 264001��
ժҪ�������M늙C�ں��հl�әC����ϵ�y�еđ����M�����о���������Բ��M늙C��Ӌ��C�����ɵIJ��M늙Cϵ�y�Ĕ��Wģ�ͣ������˲��M늙C�����հl�әC�D�ٔ���ϵ�y��Ӱ푣��o����ϵ�y�ɘ����ڵ��x���������ó���һЩ����ĽYՓ��
�P�I�~�����M늙Ci���ֿ���#�ɘ�����
�ЈD���̖��tm383.6 �īI���R�a��a ���¾�̖��1001-6848(2000)01-0021-03
1 �� ��
�ڰl�әC����ϵ�y�У����M늙C��һ����Ҫ�Ĉ���Ԫ����������ֱ��Ӱ�����������ϵ�y��Ʒ�|ָ�ˡ����P���M늙C���о�Ŀǰ��������늙C���������]�Ќ�늙C�cӋ��C����ϵ�yϵ�������]���������Ĕ��Wģ���A�κܸߣ�������һ�M�Ǿ����ַ��̽M���@���l�әC���ֿ��������OӋ��ʮ�ֲ���ġ������C���ƵIJ��M늙Cϵ�y�ڹ��I�^�����m�Б��ã������{�����c���հl�әC���һ��׃���^���������������푑�Ҫ���^�ߵĺ��հl�әC����ϵ�y�Ĉ���Ԫ���б�Ҫ���䔵�W�����������������M�Ќ��T�о���
2 ���M늙Cϵ�y�Ĕ��W����
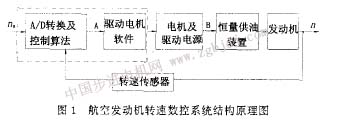
�Բ��M늙C�������Ԫ���ĺ��հl�әC�D�ٔ���ϵ�y�Y��ԭ����D1��ʾ[1]��
ԓϵ�y�У����M늙C����Ӌ��C���Ƶģ�̓����Ӌ��C�Ȳ�ܛ�����֡����M늙Cϵ�yָ���LjDl��a�c��b�c�ĸ��h������ȡ���M늙Cϵ�y�Ĕ��Wģ�ͼ�������늙C�����Ą����ԣ���������Ӌ��C�c���M늙C��ϵ���@����ȡ��ģ�;��Б����ԣ���ֱ�����ھ���ԓ���ЙC����ϵ�y�С�һ������IJ��M늙C���d�r���\�ӷ��̞�[2]��
�β�푑�ʧ�{�Ǧ�e-��׃������sin (��e -��)�֦�e-�ã�����ֹʽ���ã�
��֪�������M늙C����һ���}�_�r������һ�㾀������ϵ���^С������늙C��푑���һ��˥�p����ʎ�^�̡�
���M늙C������r�ǽ���һ�B���}�_�ġ��B�m���M�ģ���ಽ푑�һ�㲢���džβ�푑��ĺ��ε��ӣ��@ȡ�Q�����}�_�l�ʵĴ�С���l�ʲ�ͬ����늙C�D�ӵ�Ӱ�Ҳ�Ͳ�ͬ�����^���l�����ȣ����Դ�ڲ��M늙Cÿ���Mһ����ȫ�����Űl��һ�����}�_���������J��ಽ푑��džβ�푑��ĵ��ӡ��D2�Dz��M늙Cϵ�y�ಽ푑�����������1��ʾ���M늙C�ڸ���늙C****�����l�����\�е�푑����ɿ�������ԓ�l���¹�����늙C�����ʧ��������2��ʾ���M늙C�ڵ���****�����l�ʡ����l����^֮�⣨�l�����ڵ��l����^֮�ȣ���ʧ�������l�����µ�푑����ɿ�����늙C�����Բ�ʧ�����\�С�
�ڰl�әC����ϵ�y�У�ÿ���ɘ��g��ȣ����M늙Cϵ�y��������һ��������������ԓ���������Կ���һ�������ɿ����㷨��Ӌ�����_�����}�_���}�_�����cԓ�ɘ����ڃȲ��M늙C���ߵIJ������������˕r�����M늙Cϵ�y��ԓ�}�_��푑���һ���ಽ푑����ɴ˸����D2������2�����Խ����J�飬���}�_푑���D3��ʾ���D3�еĿڽ����S�}�_���ȶ�׃���ģ�t��ɘ����ڡ�
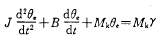
�Og(s)�鲽�M늙Cϵ�y�Ă��f������
��(t)��ϵ�y�Ć�λ�}�_푑���
��(f)��ϵ�y���}�_푑���
�t��(t)=k1��(t)���ɾ���ϵ�y�}�_푑������|���䲽�M늙Cϵ�y�Ĕ��Wģ�͞飻
3 ���M늙Cϵ�y�����Է���
|