��Ƭ�C�Ļ�ģ�����ŷ�ϵ�y
��ï�A���ϲ����չ��I�WԺ�������ϲ�330034��
ժҪ����B��һ�N��8098��Ƭ�C������������Թ�Ş�λ�Ùz�yԪ���Ć�Ƭ�C���Ƶ�λ���ŷ�ϵ�y��ϵ�y�����˿�׃�ГQ���Ļ�ģ���Ʒ�ʽ�����кܺõĿ����Ժ��^���������ԡ�
�P�I�~����Ƭ�C}��ģ���ƣ��ŷ�ϵ�y
�ЈD���̖��tm301.2 �īI���R�a��a ���¾�̖��1001-6848(2000)01-0024-02
1 �� ��
��ֱ���ŷ�ϵ�y�У��������ϵ�y�Ŀ������Լ�ʹϵ�y���Ȳ�����׃�����ⲿ�ɔ_���кܺõ����m���ԣ������ÿ�׃�ГQ����ģ���Ʒ�ʽ�����Ľ�Bһ�N����8098��Ƭ�C�Ŀ�׃�ГQ����ģ����ֱ���ŷ�ϵ�y��
2 �ŷ�ϵ�y�ĽM��
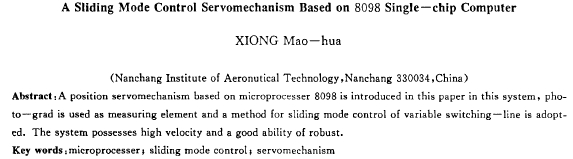
�ŷ�ϵ�y�Y����D1��ʾ����Ҫ��4���ֽM�ɣ���8098��Ƭ�C��pwm���ż������·����ż�λ�ƙz�y�·���I�P���@ʾ�·��
ϵ�y�в���8255a��pa�ڡ�pb�ڽ��չ�Ż�·������λ�Ɣ�����ϵ�y���Sλ����locm������ŵ�ÿһ���ž���l/loomm����λ������10 000���ž࣬������߿��Ƶľ��ȣ���ŵęz�y����4���l��������ÿ�a��1��Ӌ���}�_�f��Ƅ���1/4���žࡣ����16λ�Ŀ���Ӌ������λ����Ӌ����������ʼλ�Õr����ʼλ�Ùz�y�·�_ʼ�������Ɇη��B�·�a
��һ�����}�_��̖��ʹ����Ӌ�������㡣�ŷ�ϵ�y�͏�ԓ̎�_ʼλ�ƿ��ơ�λ��p�ɱ�ʾ�飺
3 �������OӋ
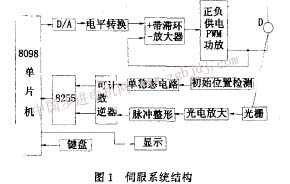
����ֱ���ŷ�ϵ�y����������h����ϵ�y���m���ĺ����ͽ��ƣ�һ������Aϵ�y��������h�OӋ��ʹ��푑��ٶȺܿ�r���t�ɰ�����h������һ�������h�����Ķ���ϵ�y������Aϵ�y[3]����Y����D2��ʾ��
��늙C�S���o�����غ�С�r�ɺ��ԣ���if=0
������f������
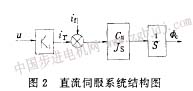
����ֱ���ŷ�ϵ�y�Ŀ��ƣ����üӲ���ͨ�����Q�ГQ�Ļ�ģ���Ʒ�����ȡ�����˝M��Ŀ��ƻ���8098��Ƭ�C�Ļ�ģ�����ŷ�ϵ�y��ï�AЧ������ģ����ֱ���ŷ�ϵ�y�Y����D3��ʾ��
ϵ�y�`��ǣ�
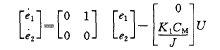
�`���B���̞飺
�ڶ��S��B���g��ȡֱ��s=clel +c2һo�����ГQ��������cl�������ij��������ˌ��F��ģ���ƣ������D3��ϵ�y�Y���D���xȡ���¿���߉�Pϵ��
�`��̿�׃�飺
�������ϵ�y푑��ٶȣ��_�������Ժ�λ�ßo���{������xȡ�����¡�c1�m��ֵ��ͨ��cl���M�����x������ģ���ƴ��ڵij�Ҫ�l������������u�������r��cl�c�����¡�c1֮�g���Pϵ�飺
ʽ��inf{����ʾ����̖����������6ֵ��r��ȡ��Сֵ���m���x�æ����£���clȡ�������ϵ�y�Ŀ����ԣ��@�N��r�»�ģ�l�����ڣ�ϵ�y��ģ�Ƿ����ڝu���������o���{���Ҿ��к��������ԡ����@ֻ����e1��e2����С�r���ܵõ������Y������e1��e2�^������u�_������r��ϵ�y |