늙C(j��)�y(c��)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c����
���\��
���㽭��W(xu��)���㽭���� 310027��
ժҪ����Ҫ��Bһ�N�m������늙C(j��)��С��늙C(j��)�Ĝy(c��)��ϵ�y(t��ng)���f������d���y(c��)��ԭ���Լ��O(sh��)Ӌ(j��)�_�l(f��)�ļ��ɻ������·������(du��)ԓϵ�y(t��ng)�Ĝy(c��)���������˺�(ji��n)Ҫ������
�P(gu��n)�I�~���y(c��)��ϵ�y(t��ng)�����d���y(c��)��}���ɻ��·
�ЈD���̖(h��o)��tm306 �īI(xi��n)��(bi��o)�R(sh��)�a��b ���¾�̖(h��o)��1001-6848(2000)01-0034-03
1 �� ��
�y(c��)��ϵ�y(t��ng)����늙C(j��)��ԇ�(y��n)ؓ(f��)�d��ݔ������(sh��)���D(zhu��n)�١��D(zhu��n)�غ��ʣ�Ӌ(j��)���b����늙C(j��)��С��늙C(j��)�����a(ch��n)���z�(y��n)���y(c��)�����I(l��ng)�������V������;��Ŀǰ���y(c��)���C(j��)һ��ɷ֞�u��ʽ�y(c��)���C(j��)���Ŝ�ʽ�y(c��)���C(j��)���l(f��)�ʽ�y(c��)���C(j��)�ȡ�����dԭ���͜y(c��)��Ӌ(j��)���ķ���������ͬ�����������c(di��n)���ڜy(c��)��ϵ�y(t��ng)�У��D(zhu��n)�صľ��_�y(c��)����������y�ġ��^�鳣�õķ��������Üy(c��)���C(j��)��m-l��������늴�����(du��)����Ĺ���������������ͨ�^�y(c��)������d�����ģ�M���������(y��ng)���D(zhu��n)�ء����ǣ���ԓ���y(c��)�õ��D(zhu��n)���侫�Ȳ��H�����Ա������Զȵ����ƣ�������늙C(j��)�D(zhu��n)�ٵ�Ӱ푣����������롣��(du��)��Ŀǰ���õĜu��ʽ�y(c��)���C(j��)����ӑՓ������һ�N�����������c����������С��ȵ�ԭ����ͨ�^ֱ�Ӝy(c��)����늴����������ݔ���D(zhu��n)�صķ����Լ�ᘌ�(du��)ԓԭ���O(sh��)Ӌ(j��)�ļ��d����y(c��)��ϵ�y(t��ng)���ɻ��·��
2�y(c��)���C(j��)���d���y(c��)��ԭ��
2.1�y(c��)���C(j��)늙C(j��)�����c(di��n)
�u��ʽ�y(c��)���C(j��)늙C(j��)�Ķ����@�M������@�M�����@�M��ͨ�^ֱ����Ԯa(ch��n)��һ�oֹ�������ň�(ch��ng)���}��ň�(ch��ng)���c��ͨ�Ć���늙C(j��)��������F(xi��n)���늉������������(du��)���ԣ������D(zhu��n)�ӵĽY(ji��)��(g��u)�c��ͨ�Ć���늙C(j��)�D(zhu��n)����ͬ��������ʹ������^�õ��D(zhu��n)�����ԣ�����\����늽M������(du��)�^����a���~���ϣ��cһ��늙C(j��)�ڽY(ji��)��(g��u)��****��ͬ���䶨���D(zhu��n)�Ӿ��O(sh��)Ӌ(j��)������D(zhu��n)��ʽ��
2.2���d���y(c��)��ԭ��
�y(c��)���C(j��)�ļ��dʾ��D����D1��ʾ��

�y(c��)���C(j��)늙C(j��)���D(zhu��n)���ڱ��y(c��)늙C(j��)�Ď���(d��ng)����형r(sh��)ᘷ����c���y(c��)늙C(j��)ͬ�Sͬ�����D(zhu��n)���y(c��)���C(j��)�����@�M�ϼ�һֱ�������ʹ���ښ�϶���γ�һ�oֹ�ň�(ch��ng)�����D(zhu��n)���D(zhu��n)���@�M�и��϶�еĴ����������(hu��)�a(ch��n)��һ�Ƅ�(d��ng)��f=f1+f2���䷽���c�D(zhu��n)�ٷ����෴������(j��)ţ�D�������ɣ��������ͷ���������С��ȡ������෴��ԭ�����䶨���ό��ܵ�һ��(g��)��С��ȵķ�������f-f�������c�D(zhu��n)������ͬ����һ�����D(zhu��n)���£�����ԓ�y(c��)���C(j��)늙C(j��)�����˶���Ҳ�����D(zhu��n)������Y(ji��)��(g��u)���Ϳ���ͨ�^��������������y(c��)�������ڶ����ϵķ�������f���M(j��n)����������ڶ����ϵ��D(zhu��n)��m��Ҳ��늴��D(zhu��n)��mem(mem=m)���ٸ���(j��)p=0.1047memn����ɵõ����y(c��)늙C(j��)���S�ϵ�ݔ������p��=p��m+��p�����С�p��y(c��)���C(j��)�ęC(j��)е�p�Ĺ��ʣ�����(d��ng)Ȼ�������܉������������������ã��y(c��)���C(j��)�Ķ����ڹ����^���в������D(zhu��n)���D(zhu��n)�لt����ͨ�^(li��n)�ڜy(c��)���C(j��)늙C(j��)�D(zhu��n)�S�ϵĜy(c��)�ٰl(f��)늙C(j��)��a�P�y(c��)�á���ԓ�N�����y(c��)�õ��D(zhu��n)�����ֱ�ӣ���(y��ng)�����^�ߵľ��_�ȡ�
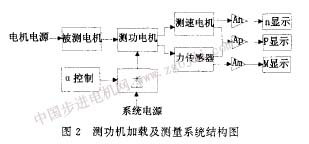
2.3ϵ�y(t��ng)�Y(ji��)��(g��u)
�y(c��)���C(j��)���d���y(c��)��ϵ�y(t��ng)�Y(ji��)��(g��u)����D2��ʾ��
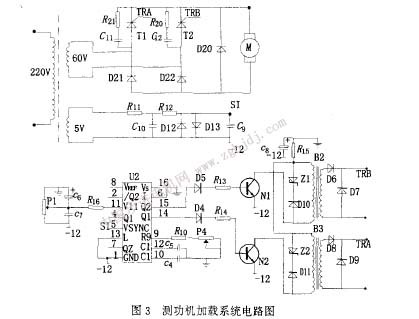
3�·����
3.1���dϵ�y(t��ng)
�·��D3��ʾ��
���d���·���ð�ؘ�ʽ�·����(j��ng)�^׃����Ć��ཻ��늣��s60v���ٽ�(j��ng)��ؘ�ʽ������õ�һ���{(di��o)��ֱ��늉���ԓ늉�������d�Դ�ӵ��y(c��)���C(j��)늙C(j��)�Ķ����@�M�Ԯa(ch��n)���oֹ�Ą�(l��)�Ŵň�(ch��ng)����(l��)�Ŵň�(ch��ng)�ď�(qi��ng)����ͨ�^��׃�ɿ�Ԫ��t1��t2�Č�(d��o)ͨ��a�ԫ@�ò�ͬ��ֱ��늉����M(j��n)���{(di��o)��(ji��)�Ϳ��ơ�
�}�_�|�l(f��)�������·���Ì��I(y��)оƬtca785����16��1�_�քe���Դ����ؓ(f��)�_��5�_��ͬ����̖(h��o)ݔ���_��9��10�_���}���{(di��o)���_��12�_���(n��i)���ƽ����б���{(di��o)���_��11�_����������_��14��15�黥��180�����}�_ݔ���_����ݔ�����}�_��(j��ng)�^���ʷŴ�ȥ�|�l(f��)���·�еĿɿ�t1��t2���|�l(f��)��(d��o)ͨ�DŽt��tca785-11�_���ƽ���Կ��ơ�
|