�C�����P��늙C�ďV�x�A�y����
���e�����x���R���������
(�������I��W������ɰ�7l0072)
ժҪ���C�����P��늙C����ϵ�y���зǾ��Ժͅ���׃�������c�����ڱ��،��ʔ��Wģ�͵Ă��y���Ʒ����y�Ԍ����M����Ч�Ŀ��ơ�������C�����y�P��늙C���о��������ȷ�����ϵ�y�ęC���������˱��،����cartma(controlled aut-regressive integraled moving average,�ܿ���ͬ�w�e�ֻ���ƽ��)ģ�ͣ����������һ�N���ڏͺ��W�j�ďV�x�A�y���Ʒ���������lnn(linear neural network�������W�j)��gpfn(gaussian p0tential function networks����˹�������W�j)���ɵďͺϾW�j�����،����M���ھ����R���V�x�A�y���������ñ��R�ĽY�����ಽ�A�y���L�Ӄ�����������C�����y�P��늙C�Ľ�λ���M����Ч���ƣ����ٶ�ϵ�y����stnbeck�ͷǾ���Ħ������ؓ�d�D�ӑT������׃����ͻ׃����r���M���˷���ԇ�Y��������ԓ���������^�����m���������w�F�˺��������ԣ�ȡ�������˝M��Ŀ���Ч����
0�� ��
Ŀǰ���C���������õ��\�ӷ�ʽ��Ҫ��݆ʽ���Ď�ʽ����ʽ�����ʽ����ӛ_��ʽ��Ӿ��ʽ���w��ʽ��.����݆ʽ����ʽ����ɷN���͵��\�ӷ�ʽ�õ����^�V���đ��á�݆ʽ�\�Ӿ����ٶȿ졢�����Ժá����Ƶȃ��c����Ҫ���������ƽ̹���B�m����ʽ�\�ӃH��ҪһЩ���m���xɢ�������c�����Կ�Խ�ϵK��ͨ�^��硢��ܛ�������ĵ��棬���к��ĭh���m���Ժ��\���`���ԡ������ʽ�C������܊����(���\ݔ��̽�ס��ɲ��)���Vɽ�_�ɡ����ܹ��I���������ʘ����T���ИI���зdz��V韵đ���ǰ����
��ʽ�C���˵��о���C�����I�������һ���ش�ļ��g�y�}�����P���\�ӵĿ��ƣ����ڲ����ŷ�늄әCֱ�����P���\�ӵ���ʽ�C���ˁ��f�������P��늙C�Ŀ���ϵ�y���Ѕ���׃���ͷǾ��Ե����c��һ���pid���ƺ��yȡ�úܺõĿ���Ч�����n���_�����D���P���ļ��ٶȞ���A�����˙C�����P�����ٶȷ������Ƶ��_�hģ�ͣ�������]�h���Ʋ��Ե��OӋ�ʄt������һ�_�����ɶ�ֱ���әC���������ˌ���о���k.kiguchi�ȿ��]���P��Ħ��������λ�ã��������в���ģ���W�j��Ħ���M���a�����˿���ȡ�������Ԫ���Ƶķ�������Q����C�����P��늙C�ķǾ��Ԇ��}�����M���ˌ������A�y���ƾ��жಽ�A�y���L�Ӄ������ھ�����У������������ϵ�y��ģ�;���Ҫ��ͣ�����i���õĸ�ۙ���ܼ��^���������Եȃ��c������õ��ˌW�߂�����ҕ��r k okerᘌ�˹̹����W�������ɶȵ��P���Cе�ۣ����V�x�A�y�����celman�W�j��Y�ϣ��OӋ��һ�����ܿ������Á����ƙCе�۸��P���Ľ�λ���c���ٶȣ�f temunas��ᘌ�һ�������S�C�_�������ɶ��P���Cе��������ۙϵ�y���о���siso(��ݔ���ݔ��)�W�j�V�x�A�y���Ʋ��ԡ�
����ᘌ�һ������늄�ֱ�C�����P��늙C�\�ӿ���ϵ�y�������˱��،����carimaģ�ͣ����Ïͺ��W�j��ϵ�y�M���ھ����R���\�ÏV�x�A�y���Ʒ������P��늙C�Ľ�λ���M���˿����о���
1�������W�C��ģ��
��Dl��ʾ.������C���˵��y�P��늙C����
��������늙C��늉�ƽ�ⷽ�̣�
늴��D�ط��̣�
ʽ�У�um��늘�늉���lm��늘�늸У�rm��늘����;im��늘������e�鷴늄ݣ�ke�鷴늄�ϵ������m��늙C���ٶȣ���m��늙C��λ�ƣ�tm��tl��tf�քe��늴��D�ء�ݔ���D�غ�Ħ���D�أ�jm��jl��j�քe��늙C��ؓ�d�Ϳ����D�ӑT����kt��늴��D��ϵ����m����ȵ�Ч�|�ģ�l���Ч�|���c�y�P�����ĵľ��x��
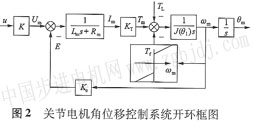
��ʽ(1)��ʽ(5)���Եõ���ֱ��늄әC�Ľ�λ�Ʀ�m��ݔ���ĄӑB�Y���D����D2��ʾ�����У�k
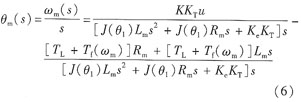
�鹦��ϵ����u�������ݔ�������ɈD2�ɵã�
ʽ�У�tf�Ǧ�m�ķǾ��Ժ�����j�Ǧ�1�ĺ����������،���һ����C�����y�P��늙Cģ�;��зǾ��Ժͅ���׃�������c��
|