��B���������Ĵ��ʶ����oˢֱ��늄әC
���죬ه���x�����
(��܊���̴�W��������h430033)
ժҪ����ˮ���w���׃���ʾ�ꇁ�Ӌ�㷴늄ݣ��������������β����淴늄ݲ��Ύ������`�ͨ�^����һ�_30 kw�����oˢֱ��늄әC�Ĕ��Wģ�ͣ���matlab�Z�Ծ��Ơ�B���̷�����ʴ_�،�늙C���d���Լ�ͻ��ؓ�d�ȄӑB�^���M�����ܷ��棬����Y���c����Ԫ�����Y�����Ǻϣ��Ķ���C��ԓ��������Ч��һ
o�� ��
�F�A�εğoˢֱ��늄әC���������ҹ����^С���������䑪�÷������c����늙C��ȣ������oˢ늄әC���H���Ը������ܣ�߀�����ϵ�y�Ĺ��������Ϳɿ��ԡ����ڄӑB���ܼ��ɿ���Ҫ���^�ߵĈ��ϣ��ɲ���30 kw�����oˢֱ��늄әC�����ʟoˢֱ��늄әC�������@�M�����^С������{�ٿ����y�ȴ����ܷ������о���ӑB���Ե���Ч;����Ҳ�ɞ��{�ٿ����ṩ������
�������ğoˢֱ��늄әC�ı�������о��īI�У�����늙C�Ľ�ģ�c����һ�㶼����simulink�ЬF�е�ģ�K�����ɣ�����ͨ���������β����淴늄ݲ��Σ��o�����Ӌ�㎧���`�Ȼ�����ڶ����oˢֱ��늄әC��Ŀǰ�]�ЬF�ɵ�ģ�K�ɹ��{�ã������������w���׃���ʾ�ꇁ�Ӌ�㷴늄ݣ��ڴ˻��A�Ͻ�����һ�_30 kw�����oˢֱ��늄әC�Ĕ��Wģ�ͣ�������B���̷���matlab�Z�Ծ��Ƴ���ԓ늙C�M�з��棬���H�����ˌ������β����淴늄ݲ��Ύ������`�Ҳ������늙C�����Լ�ؓ�d׃�����ģ����������^������ֱ�^��
1�����oˢֱ��늄әC���Wģ��
1��1늉�����
ԓ늙C���D�ӱ�����Ƭʽ��䓽Y���������@�M��ɂ����������p������ֲ����py��30o�������������J�������w�����������ã�����͡��Ŝ��͜u����Ӱ푡�
��늙C�W��֪���oˢֱ��늄әC���������@�M늉����̿ɱ�ʾ��
�������w��Ч�����@�M����f�������w�����Ӹ����@�M�a���Ĵ�朣�d��f/dt��ʾ��朌��r�g��׃���ʣ����ڌ��HӋ���в���������ȡ�������HӋ���Ц�f�������D��λ�ýǁ���ȡ�ģ������D��λ�ýǦȵĺ�������˿��Ԍ����D�Q�錦�D��λ�ýǵ�׃��
�ʣ�����
ʽ�У�a��f/at���������w��朌��D��λ�ýǵ�׃���ʣ����Q����׃���ʾ�ꇣ�
�������oˢֱ��늄әC�пɱ�ʾ�飺
fma1,��fa2�քe�������w�������@�M���a���Ĵ��׃���ʡ�
��ʽ(2)����ʽ(1)�õ���
ʽ�У��؞��D�ӽ��ٶȣ�r���@�M�ă��裻u=
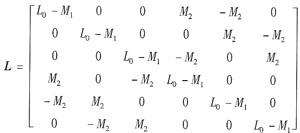
����늄әC�ĽY�������Ժ����OЧ�����D�ӵĴ��費�S�D��λ��׃����׃�������ٶ����������@�M��ɽM��ȫ���Q�������@�M�����늸о�ꇡ��鳣�����c�D��λ�ýǟo�P������[hj��3]
[hj]ʽ�У�l0�鶨���@�M���ԸУ�m1��ͬһ�����@�M�g���߸У�m2��������@�M�g�Ļ��С�
1 2늴��D�ط��̼��\�ӷ���
늴��D�ط��̞飺
ʽ�У�wm��ʾ����ϵ�y�ĴŹ��ܡ��У�
ʽ�У�if�������w��Ч��������lsf(��)�Ƕ��Ӹ����@�M�������w��Ч����@�M�a���Ļ��У�lfs(��)�������w��Ч����@�M�����Ӹ����@�M�a���Ļ��У���ӛ��
�Ɍ��Q�Pϵ��֪��
����֪��
|