�oλ�Â������oˢֱ��늄әC�������о�
��գ����ڣ��x�l��
(���Ϲ��̌WԺ��������̶411101)
ժҪ�����һ�N��Ӌ��Ƕʽ���şoˢֱ��늄әC�oֹ�r�D��λ�õ��·�����ԓ��Ӌ������ԭ���ǻ������ڶ��Ӵ��ʹ�ô��S�Пoˢֱ��늄әC������l��׃�����䃞�c���D�ӳ�ʼλ�õ�****�����`���6o��늄әC�������D���@�����ӡ�����Y��������ԓ��������Ч�ԡ�
0�� ��
Ŀǰ�o�������oˢֱ��늄әC�D��λ�Ùz�y����÷�늄ݷ���Ȼ����늙C�oֹ���D�ٺ͕ܵr�����yͨ�^��늄��^���c�z�y�õ����_��λ����̖���@�Ͳ����ܻ���y��Ӌ�D��λ�ã�ʹ늙C�������y���҇���Ӱ���늙C���{�ٷ�������ˣ���ο˷���늄ӄݷ���늙C�������y���Լ���ΔU��늙C�{�������ͳɞ�ʮ����Ҫ���n�}�����@Щ���}�w���Y����Ҫ�о��ڟoλ�Â������oˢֱ��늄әC����θ����_�ؙz�y�D��λ����̖��늙C�oֹ�r��Ӌ�D�ӳ�ʼλ�õ�һ�N���^���õķ����Ƕ����F�ĵ��Ч��������늙C�D�ӴŘO���O�c�����@�M�S����̎�������@�M늸�ֵ��С��ͨ�^ʩ��늉�ʸ��������늙C�Ķ����@�M���_���D��λ�ã���늸�ֵ��С̎��������늉�ʸ����d�S���īI[3]�����һ�N�µķ�����ԓ�����D��λ�ù�Ӌ��****�`����15o����������ķ���ʹ�D��λ�ù�Ӌ��****�`���6o���c�īI[3]�ķ�����ȣ������D�����@����
1�D�ӳ�ʼλ�ù�Ӌԭ��
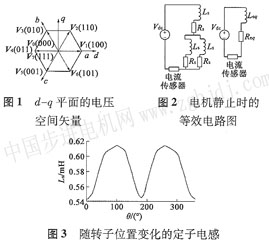
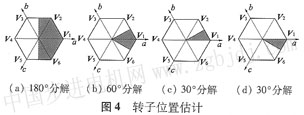
�D��λ�ù�Ӌ�ǻ��ڶ����F�ĵķǾ��ԴŻ����ԣ����������@�M����a���Ĵň��c�D�Ӵň�����r����·ͳ̶��½��������½���늸мӴ�������p�٣���֮����������늸�׃С������������Dl��늉�Դ��׃����d-qƽ���8��늉����gʸ����ͨ�^ʩ��늉����gʸ���͜y�������Ķ���������Ϳ��Թ�Ӌ���D��λ�á��oˢֱ��늄әC���oֹ�r�ĵ�Ч�·��D2��ʾ���D3���S�D��λ�æ�׃���Ķ���늸С�늸����D��d�S�r��Сq�S****����ˣ���ʹ��늙C������a�����@���F�����Ӌ�D�ӳ�ʼλ�á�
2�D��λ�ù�Ӌ
�������D��λ�ù�Ӌ�փɂ��A�Ρ���һ�A�Σ�����30���ֽⷨ��Ӌ�D��λ�ã���****λ�ù�Ӌ�`����15o���ڶ��A���DZ���������IJ���һ�����ε��·��́���Ӌ�D��λ�á�
��һ�A�η�i�����E��
(1)��D4a��ʾ�����ɂ������෴��늉�ʸ��v1��v4����r�gts�Ⱥ�ʩ�ӵ�늙C�ϣ�����ÿ��늉�ʸ���y������ֱ��ĸ���ɘ�����քe�惦�飬i1��i4�����i1����i4���t�����ŘO���O���^����늉�ʸ��v1���@�ӴŘO���O��̎�ڈD4a�Ӱ���օ^�t��180o�ֽ�ȿɹ�Ӌ�D��λ�á�
(2)λ�ڈD4a�Ӱ���օ^�����ɂ�늉�ʸ��v2��v6��ͬһ�r�ڃȽ���ʹ�ã��䌦����ֱ��ĸ���ɘ�����քe��i2��i6���t�D��λ�û�d�S���^�ӽ�ֱ��ĸ���ɘ�����^���늉�ʸ�������磬������i1����i2��i6���t�D��d�Sλ�ڈD4b�Ӱ���օ^��
(3)������i2����i6���t�ɔඨ�D��d�Sλ�ڈD4c�Ӱ���օ^��֮���t�D��d�Sλ�ڈD4d
�Ӱ���օ^��
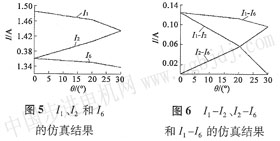
�ڵڶ��A���У����˾��_�ع�Ӌ�D��λ�ã����õ�һ�A�Μy�������������ٶ��D��λ�����ڈD4c��ʾ�ą^�tʹ�õĜy�������i1��i2��i6���@Щ�����0o��30o�D��λ�õķ���Y����D5��ʾ���Y���������S���D��λ�õ����ӣ�i1��i6�p�٣���i2���ӣ������i1-i2��i2-i6��i1-i6���D��λ�õķ���Y����D6��ʾ���ٶ�i1-i2��i2-i6��i1-i6�ľ��Խ���ֵ��D7��ʾ���t�D��λ�æȵĹ�Ӌֵ�飺
��ʽ(1)�ɸ����_�ع�Ӌ�D��λ�ã�
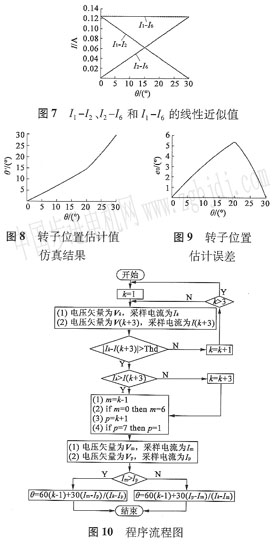
�D��λ�æȹ�Ӌֵ�ķ���Y����Ӌ�`��e�ȷքe��D8�͈D9��ʾ���D9������ʽ(1)�Ɍ�****��Ӌ�`��pС��6o���������̈D��Dl0��ʾ��
3���ӷ���
�oˢֱ��늄әC���oֹ�����ӕr��늴��D�ؿɱ�ʾ�飺
|