���ڌ��ÿ���оƬ�IJ��M(j��n)늙C(j��)������
������
(�����C(j��)е���I(y��)�W(xu��)Ժ������100085)
ժҪ����B�Ԍ��ÿ���оƬpbd3517.pbl3770����Ę�(g��u)�ɵă��ಽ�M(j��n)늙C(j��)���������O(sh��)Ӌ(j��)����Ҫ�漰���Ŀ����·�Ę�(g��u)�ɡ�ͬ�����ĸ��M(j��n)���(q��)��(d��ng)�·�IJ�(li��n)ʹ�ã�ͨ�^(gu��)��(sh��)�(y��n)�C��ԓ��������(ji��n)�Ρ���(sh��)�á�
�P(gu��n)�I�~�����M(j��n)늄�(d��ng)�C(j��)�����ÿ���оƬ��������
�ЈD���̖(h��o)��tm383.6 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1001-6848(2000)03-0021-03
1 �� ��
���꣬�S��������������Ų��ϵİl(f��)չ�����M(j��n)늄�(d��ng)�C(j��)���о������a(ch��n)����(y��ng)�ñ��������õİl(f��)չ��(sh��)�^�����M(j��n)늄�(d��ng)�C(j��)ϵ�y(t��ng)�ѳɞ�C(j��)�һ�w��Ԫ���ͽM���Б�(y��ng)�ÏV�����a(ch��n)���^���һ��(g��)�C(j��)�N�����M(j��n)늙C(j��)�������Y(ji��)��(g��u)�ж�N��ʽ������Dz��÷���Ԫ���M�ɵ��������(f��)�s��ģ�M�����·�������{(di��o)ԇ�y�ȴ�(w��n)���Բ����u����̭�����C(j��)����Ƭ�C(j��)������Ę�(g��u)�ɵĔ�(sh��)�ֿ����·�{(di��o)�ٿ��ƹ���(qi��ng)���������������ٶ�����ȱ�ݣ�һ��ֻ�m���ڏ�(f��)�s���\(y��n)�п��ƈ�(ch��ng)�ϣ�����늙C(j��)���ƌ���оƬ�ij��F(xi��n)���o���M(j��n)늙C(j��)���������O(sh��)Ӌ(j��)����(l��i)�O��ı������@�N����ģ�M����оƬ���ƹ���(qi��ng)�����o(h��)�������ơ��������ܷ�(w��n)�����M�ɵ�ϵ�y(t��ng)��������·��(ji��n)�Ρ����ɔ_������(qi��ng)���e�m���ڌ�(du��)�������w�e���r(ji��)�����ܱ�Ҫ���^�ߵĈ�(ch��ng)�ϡ�
���Ľ�B��pbd3 517��pbl3770����Ę�(g��u)�ɵă��ಽ�M(j��n)늙C(j��)���������O(sh��)Ӌ(j��)����Ҫ�漰���Ŀ����·�Ę�(g��u)�ɡ�ͬ�����ĸ��M(j��n)���(q��)��(d��ng)�·�IJ�(li��n)ʹ�á�
2�������·
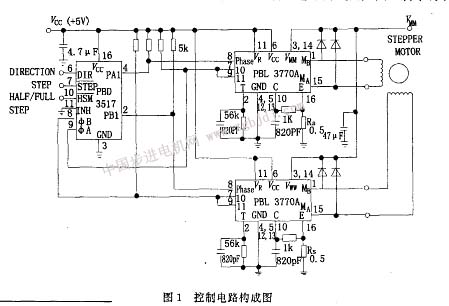
�������·��(g��u)�ɈD��D1��ʾ���D�У�pbd3 517��ericsson��˾���ƵIJ��M(j��n)늙C(j��)���������ü����·���������ஔ(d��ng)��һ��(g��)�h(hu��n)���}�_������������dir����늙C(j��)���D(zhu��n)��ȡ1��ȡo�r(sh��)늙C(j��)���D(zhu��n)���෴��step�鲽�M(j��n)�}�_��̖(h��o)ݔ��ˣ���ÿһ��(g��)�}�_���½��أ�늙C(j��)�a(ch��n)��һ�����M(j��n)��hsm��벽��ȫ��ģʽ�O(sh��)�ã�hsm-o��벽�\(y��n)��ģʽ��hsm=1��ȫ���\(y��n)��ģʽ��inh���ֹ��̖(h��o)�ˣ�inh=1�P(gu��n)������ݔ�����벽�\(y��n)�Еr(sh��)a�༰b����������̖(h��o)ݔ���ˣ��鼯늼�(j��)�_(k��i)·ݔ����pai��pbi��a�༰b��ݔ����̖(h��o)�ˣ��鼯늼�(j��)�_(k��i)·ݔ����pbd3 517ݔ���ݔ����̖(h��o)֮�g�ĕr(sh��)���P(gu��n)ϵ��D2��ʾ��
 pbl3770��h����}�l�{(di��o)�����_(k��i)�P(gu��n)�Ŵ�����늄�(d��ng)�C(j��)�@�M����ژ��ݔ����ma��mb����(d��ng)ݔ��߉����λ���ƶ�phase�顰1���r(sh��)������Ę�·ݔ����ma��(j��ng)�@�M����mb����(d��ng)phase�顰0���r(sh��)�������mb����ma��io .ii��߉��B(t��i)����늄�(d��ng)�C(j��)�@�M����Ĵ�С��io/lһ00�r(sh��)���@��********�������k��1��10�r(sh��)���@�ðٷ�֮60��������@�ðٷ�֮20�������/o/lһ11�r(sh��)��늄�(d��ng)�C(j��)�����0������ľ��w��(sh��)ֵ��vr��rs�Q����
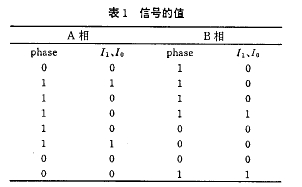
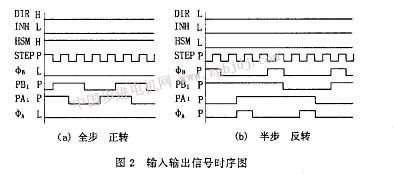
����(j��)�D2�ĕr(sh��)��D���ɵ�phase��1\10����̖(h��o)��ֵ���1��ʾ���ɱ�1�ɵ�늙C(j��)�Ĵň�(ch��ng)ʸ���D��D3��ʾ����늙C(j��)̎��ȫ���\(y��n)�Р�B(t��i)���t�ň�(ch��ng)�����D(zhu��n)����?y��n)?��3��5��7��1һ�����������D(zhu��n)�����D(zhu��n)���D(zhu��n)�ӵIJ��M(j��n)�M(j��n)��Ҳ��1��3��5��7��1һ������늙C(j��)̎�ڰ벽�\(y��n)�Р�B(t��i)���t�ň�(ch��ng)�����D(zhu��n)����?y��n)?��2��3��4-5��6��7��8-1һ�����t�D(zhu��n)��Ҳ��������M(j��n)��
3 ͬ�����ĸ��M(j��n)
�D1��ʾ��δͬ���ă��ಽ�M(j��n)���������·�D��ͨ��������늙C(j��)һ���@�M���·�Q��һ��(g��)ͨ�����tԓ�·�����ɂ�(g��)ͨ����������һ·�Q��ͨ��1������һ�N�Q��ͨ��2���ڴ����(sh��)��(y��ng)���У���ͬ������������(hu��)����ʲô��(w��n)�}��Ȼ������һЩ��r�£��ɂ�(g��)ͨ��֮�g�ĸɔn����������늙C(j��)�����(d��ng)��ͨ�^(gu��)ʹ��ͨ��ͬ������(hu��)ʹ���ɔ_���͡����^ͬ����������ʹ��ͨ���_(k��i)�P(gu��n)��һ�������ƣ�ͨ��180��Ч���^�á���(d��ng)��ͨ��δͬ���r(sh��)����ֵ��������ɂ�(g��)ͨ������ĺ͡���(d��ng)����180�ȣ���ֵ��������һ��(g��)ͨ���Ĺ��������t�ߴ��C����(hu��)���@�pС���@��ζ�������ˌ�(du��)�Դ�V����Ҫ��ͬ�ӵĞV������ȡ���^�õĞV��Ч�����c�����·�Ĵň�(ch��ng)�����Ҳ��(hu��)����(y��ng)���͡�ͬ��������·��D4��ʾ�����õ� |