�p��������D(zhu��n)������늄�(d��ng)�C(j��)���Ƽ��g(sh��)
�R���䣬���l(w��i)��(gu��)���_ ��
(�������I(y��)��W(xu��)�Կ�ϵ���������710072)
ժҪ����B��ϡ�������p��������D(zhu��n)������늄�(d��ng)�C(j��)(latm)λ���ŷ�ϵ�y(t��ng)����ԭ��������ϵ�y(t��ng)��늚ⶨλ���D(zhu��n)���c��λ�Ɯy(c��)�����ٶ�λ���p�]�h(hu��n)���p��ȿ��Ƶ��M(j��n)�����о������нo�������P(gu��n)��(sh��)�F(xi��n)�·������(du��)ϵ�y(t��ng)���漰��(sh��)�(y��n)�Y(ji��)���M(j��n)���˷�����
�P(gu��n)�I�~�������D(zhu��n)�ǣ�����늄�(d��ng)�C(j��)��늚ⶨλ��ֱ���(q��)��(d��ng)��pwm����
�ЈD���̖(h��o)��tm351 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1001-6848(2000)03-0024-03
1 �� ��
�����D(zhu��n)������늄�(d��ng)�C(j��)λ���ŷ�ϵ�y(t��ng)�������Ƕȷ�����(n��i)�ܿ������D(zhu��n)�͜�(zh��n)�_��λ�Ҿ����^�������ֱ���(q��)��(d��ng)ϵ�y(t��ng)���@�Nϵ�y(t��ng)���ں����ŷ��y����C(j��)����(d��ng)���C(j��)�����P(gu��n)��(ji��)�����_(d��)�쾀���C(j��)�d�����ȸ߾���늚��ŷ��ýy(t��ng)���������Ƕȃ�(n��i)��(du��)ؓ(f��)�d��ֱ���(q��)��(d��ng)����(gu��)����80���ĩ�ь������ں������w���M(j��n)�b�ú��l(w��i)�Ƿ���x�����R�C(j��)��(g��u)�ľ��ܿ��Ƶȸ��g(sh��)�I(l��ng)��[1]������(gu��)��(n��i)�H��ָ��(q��)��(d��ng)�����M(j��n)���^(gu��)�о������ڲ��Ï��ɶ�λ���侫�Ȳ��ߡ���������Ҳ�o(w��)���M��߹����ܶȺʹ���ֱ���(q��)��(d��ng)����Ҫ�����Ľ�Bϡ�������p��������D(zhu��n)������늄�(d��ng)�C(j��)λ���ŷ�ϵ�y(t��ng)�Ĺ���ԭ������(du��)��늚ⶨλ���D(zhu��n)���c��λ�Ɯy(c��)�����ٶ�λ���p�]�h(hu��n)���p��ȿ��Ƶ��P(gu��n)�I���g(sh��)�M(j��n)�����о����Y(ji��)��������ԓ����늄�(d��ng)�C(j��)���ڟo(w��)��p�ٽY(ji��)��(g��u)���w�eС�������ܶȸߡ�������ϵ�y(t��ng)��λ��(zh��n)�_���\(y��n)�о��ȸߡ��l푌����ɿ��Ըߡ�
2�����D(zhu��n)������늄�(d��ng)�C(j��)λ���ŷ�ϵ�y(t��ng)����ԭ��
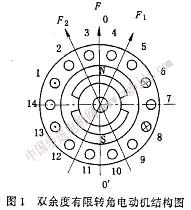
�����D(zhu��n)������늄�(d��ng)�C(j��)�ڶ����ϰ��b늘��@�M���D(zhu��n)���ϰ��bϡ�������w���c�o(w��)ˢֱ��늙C(j��)���ƣ��������D(zhu��n)������늄�(d��ng)�C(j��)������һ���@�M������Y(ji��)��(g��u)����Ҫ�Q��·����Ҳ�������D(zhu��n)�ǟo(w��)ˢֱ������늄�(d��ng)�C(j��)�����ˌ�(sh��)�F(xi��n)�p��ȿ��ƣ����ϵ�y(t��ng)�ɿ��ԣ�������Ƕ�Ń����@�M������Ƕ�ţ�늄�(d��ng)�C(j��)�Y(ji��)��(g��u)��D1��ʾ�����ӹ�14��(g��)�ۣ�����7��14��ղۣ�1��3��5���һ���@�M�ό�߅��8��10��12������߅��ͬ��2��4��6��ڶ����@�M�ό�߅��9��11��13����߅���@�����@�M�քe�Q��a-a��b-b���@��ÿ���@�M��3��(g��)��Ȧ�M�ɡ���������늚ⶨλ��ÿ���@�M��һ��(g��)��Ȧ���鶨λ�@�M��3��(g��)��Ȧ��(li��n)�����鹤���@�M�����⣬���˜pС�X��Ч��(y��ng)�����Ӳ���б�۽Y(ji��)��(g��u)��
ԓ�����D(zhu��n)������늄�(d��ng)�C(j��)λ���ŷ�ϵ�y(t��ng)���@�M늙C(j��)���p��ȿ������͆����λ�Â����������ֽM�ɣ����Ђ�������������ʽ��늾��a��������늙C(j��)�ٶȺͽ�λ�����z�y(c��)��ϵ�y(t��ng)���������r(sh��)���p��ȣ���(d��ng)һ��(g��)��ȹ��ϕr(sh��)����һ����������������ұ��C���ij���������ȿ����·���ƣ���ϵ�y(t��ng)�p��ȿ���ԭ��D��D2��ʾ��
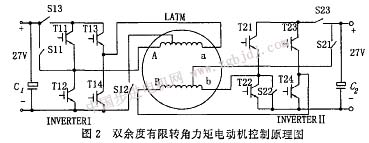 ��ϵ�y(t��ng)�õ�һ���@�M��һ��(g��)��Ȧ1-8�͵ڶ����@�M�ĵ�����(g��)��Ȧ6-13���鶨λ�@�M��fi��fz�����λ�@�M�S�������ń�(sh��)λ�á��O(sh��)�D(zhu��n)�әC(j��)е��λ̎��f1��f2�A�ǵ�ƽ�ּ�(j��)f̎���ϳɴń�(sh��)λ�ã�����oo����ô늄�(d��ng)�C(j��)�����Ƕ�һ����+�ڃ�(n��i)���\(y��n)��(d��ng)����00�������(zh��n)���������D(zhu��n)��(d��ng)�������p���a��b�����@�M�����r(sh��)�ęC(j��)е��λ����(y��ng)��ԓo��������(zh��n)����(du��)��a���@�M����늚ⶨλ������sll��s12,�ɂ�(g��)�^������_�|�^ͬ�r(sh��)�]�ϡ�1-8��Ȧ��27vֱ��ĸ����ȡ늣��D(zhu��n)����λ���D(zhu��n)���cfi��(du��)�R����(j��ng)�^(gu��)һ���ӕr(sh��)��sll��s12ͬ�r(sh��)���_������λ��ɡ�ͬ�r(sh��)s13�]�ϣ��������·��늣���һ�̶�pwm��̖(h��o)��(l��i)�(q��)��(d��ng)��׃��i��t1��l(��t��t3)�ܣ���27v�}�_��������3��(g��)��Ȧ��(li��n)��a-a���@�M�ϣ�ʹ늙C(j��)��r(sh��)����D(zhu��n)����(d��ng)�D(zhu��n)����λ��(j��ng)�^(gu��)f1��f2�A��ƽ�־�f�r(sh��)���ù�늾��a���ą�����̖(h��o)z��z��̖(h��o)����ǰ�{(di��o)��(ji��)��(bi��o)����f1��f2�ĊA��ƽ�ּ�(j��)f������ȥ�|�l(f��)�p��ȿ������е��|�l(f��)��ʹ��Ӌ(j��)��(sh��)��������λ���Ķ���(sh��)�F(xi��n)�C(j��)е��λ�c늚���λ�Ľy(t��ng)һ�����ȫ��늚ⶨλ������z��̖(h��o)���D(zhu��n)�ٿ���ԓpwm��̖(h��o)��ռ�ձȁ�(l��i)�{(di��o)��(ji��)��һ���{(di��o)���������ٸ�׃��늚ⶨλÿ��ֻ����һ���@�M�M(j��n)�У�����ÿ����늺�ϵ�y(t��ng)�Ԅ�(d��ng)��λ���������g���ٶ�λ���������b�ඨλ������6-13��Ȧ��(sh��)�F(xi��n)����λ������z��̖(h��o)�^(gu��)��ֻ��형r(sh��)��D(zhu��n)��(d��ng)��
��λ����Ժ������Ԅ�(d��ng)�������o����λ��ָ����̖(h��o)��ʹa��b�����@�M��(sh��)�F(xi��n)�p����(q��)��(d��ng)����늾��a�����z�y(c��)����λ�÷�����̖(h��o)���` |