����pwm��(f��)�Ͽ��Ƶ�늄�(d��ng)Ħ��܇���Ʋ���
���S܊������Ӣ
���ϲ����ՌW(xu��)Ժ�y(c��)��ϵ������ �ϲ� 330034��
ժ Ҫ���Ԍ�(sh��)�`����A(ch��)�������һ���m���ڲ����_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)(srd)��늄�(d��ng)Ħ��܇늄�(d��ng)�\(y��n)�еĿ��Ʋ��ԣ�ͬ�r(sh��)��(du��)��늄�(d��ng)�\(y��n)���У�����ϵ��(sh��)��(du��)ϵ�y(t��ng)��Ӱ��M(j��n)���˷�������̓�(y��u)������(sh��)�(y��n)�����������Ʋ����m��늄�(d��ng)Ħ��܇�����_(d��)����һ��(g��)�����Ч����
�P(gu��n)�I�~���_(k��i)�P(gu��n)����늙C(j��)��늄�(d��ng)Ħ��܇������
�ЈD���̖(h��o)��tm301,2 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1001-6848(2000)04-0024-03
1 �� ��
��Փ����늄�(d��ng)Ħ��܇�(q��)��(d��ng)늙C(j��)���õ����_(k��i)�P(gu��n)����늄�(d��ng)�C(j��)(srd)���@�N늙C(j��)��70������ڲ������d�l(f��)չ����(l��i)��һ�N��������(q��)��(d��ng)�b�ã�������Ҫ��(y��u)�c(di��n)��[1]��늙C(j��)�Y(ji��)��(g��u)��(ji��n)�Ρ��ɱ��͡����Ӟ鼯���@�M���D(zhu��n)�ӟo(w��)�@�M������m�����^����t������׃�Q�������ڰl(f��)��һ����׃�����^��ֱͨ��·���ϣ��ɿ���(sh��)�࣬�_(k��i)ͨ�Ǧ�1���P(gu��n)�����늉������������Ӱ��D(zhu��n)�أ��{(di��o)�����ܺã��ܷܺ���،�(sh��)�F(xi��n)�����Ƅ�(d��ng)�Լ������Ļ��գ�����������О�늄�(d��ng)܇�I(l��ng)���һƥ�����R����
2 srd늄�(d��ng)Ħ��܇늉��ز�pwm���ƹ���ԭ��
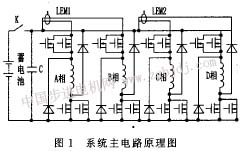
��(du��)�ڲ���(du��)�Q������·����D1��ʾ������(j��ng)�ƌ�(d��o)�ɵã�

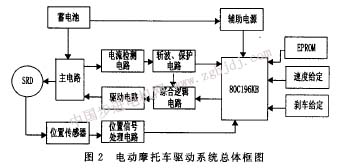
��(d��ng)��늉��㶨�r(sh��)��늙C(j��)�ʴ���(l��)�ęC(j��)е���ԡ���(d��ng)t�㶨�r(sh��)��늙C(j��)�D(zhu��n)���c��늉������ȡ���˿���ͨ�^(gu��)�{(di��o)��(ji��)��늉�u����(sh��)�F(xi��n)��(du��)srd���{(di��o)�ٿ��ơ�����(du��)��(y��ng)ijһ���V��������μ��ز���pwm�{(di��o)���{(di��o)�ٿ��ƣ���ʹ��1����2�̶��t����������@Ȼ�ġ���?y��n)���ijһ�ٶ����\(y��n)�е�sr늙C(j��)����ͬ���D(zhu��n)�أ���1����2��ռ�ձȿ����ж�N��ͬ�ĽM�ϣ������(du��)��(y��ng)�в�ͬ��С�������Чֵ����̶���1����2��ֻ�{(di��o)ռ�ձȵķ����t�o(w��)������������(g��)�\(y��n)�������(n��i)�p����С��Ч��****����˞����Ч�ʺͫ@���^��ij�����늙C(j��)���_(k��i)ͨ���P(gu��n)���Ҳ����S�D(zhu��n)�ٵĸ�׃��׃����ᘌ�(du��)�@һ��r����ϵ�y(t��ng)���õ�pwm+��(y��u)���Ƕȵď�(f��)�Ͽ��Ʋ��ԣ�����w�^(gu��)�̞飺��pwm�ز���̖(h��o)�{(di��o)�Ƶ�����۵����_(k��i)�P(gu��n)�ܵ��|�l(f��)�}�_�@�У�ͨ�^(gu��)�{(di��o)��(ji��)pwm��ռ�ձȣ��������@�M��늉�����(sh��)�F(xi��n)�{(di��o)���{(di��o)�١���(du��)�ڿ��ƅ���(sh��)���tͨ�^(gu��)��(sh��)ֵ���棬��늙C(j��)****������Ŀ��(bi��o)�����Ч�ʵ�Ҫ��ᘌ�(du��)��ͬ���D(zhu��n)�٣��M(j��n)�Ѓ�(y��u)����Ȼ���Ƴɱ������Ƭ�C(j��)����Ƭ�C(j��)�����ڈ�(zh��)���^(gu��)���У�����(j��)�D(zhu��n)�م^(q��)�ηքe����{(di��o)����(j��ng)�^(gu��)��(y��u)�˵Ħ�1����2ֵ���@�ӽ�(j��ng)�^(gu��)��(y��u)����Ŀ��Ʒ����������ϵ�y(t��ng)��Ч�ʣ�������늄�(d��ng)Ħ��܇���m(x��)���̣��Ķ��_(d��)���˃�(y��u)�����Ƶ�Ŀ�ġ�늙C(j��)Ħ��܇�(q��)��(d��ng)ϵ�y(t��ng)���w��(g��u)����D2��ʾ��
3 srd늄�(d��ng)Ħ��܇pwm����늄�(d��ng)�\(y��n)��ϵ�y(t��ng)���·�Ĕ�(sh��)�W(xu��)ģ��
���˺�(ji��n)�����ڽ�����ϵ�y(t��ng)���·�Ĕ�(sh��)�W(xu��)ģ��֮ǰ���������¼��O(sh��)��
(1)��Ӌ(j��)�Դ늉��IJ���(d��ng)��
(2)���_(k��i)�P(gu��n)Ԫ�����_(k��i)ͨ�c�P(gu��n)��Ԫ�^(gu��)���^(gu��)�̡�
(3)�����]늙C(j��)�F���еĴŜ��p�ĺ͜u���p�ġ�
(4)늙C(j��)������(du��)�Q����Ӌ(j��)���g���С�
�ɴ˼����Ќ�(xi��)����ϵ�y(t��ng)���·�Ĕ�(sh��)�W(xu��)ģ�͡�
���ڱ�ϵ�y(t��ng)���·���õ���ʽ��4���(du��)�Q���Y(ji��)��(g��u)��ʽ����4���g���(d��)������ֻ회�(du��)һ���M(j��n)�з������ɡ�
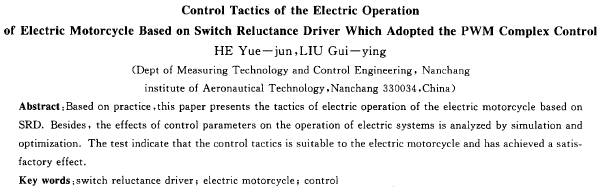
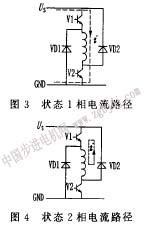
��(du��)�ڱ�ϵ�y(t��ng)���õ�pwm�{(di��o)���{(di��o)�ٔ؆ιܿ��ƣ���������N������B(t��i)��
��B(t��i)1����D3��ʾ�����_(k��i)�P(gu��n)��vl��v2��(d��o)ͨ����늳ؽ�(j��ng)���_(k��i)�P(gu��n)��v1��v2�����@�M�ṩ������˕r(sh��)���@�M�m(x��)�����O���P(gu��n)�࣬��������늳صķ���������������D3�vʾ·������(d��ng)�� |