ģ�M�˻�����Ⱥ�����㷨�ڮ���늄әC�������R�еđ���
��÷�����w
(��ɽ�ƌW���g�WԺ���V�|��ɽ528000)
ժҪ��������ģ�M�˻��㷨������Ⱥ�㷨�ă�ȱ�c�������һ�N���ÃɷN�㷨���c�Ļ�σ����㷨�����o����Ԕ�����ò��E�����î���늄әCֱ�ӿ��d�������ԣ�������늄әC�ӑB���Wģ�ͅ����M���˱��R��ͨ�^�c�����N�㷨���R�ĽY���M�б��^���f��ģ�M�˻�����Ⱥ�����㷨��Ч�ؽY����ģ�M�˻��㷨��ȫ��������������Ⱥ�㷨�Ŀ����Ք������c��
�P�I�~��ģ�M�˻��㷨������Ⱥ�㷨��ģ�M�˻�����Ⱥ�㷨���������R
�ЈD���̖��TM343 �īI���R�a��A ���¾�̖��1004��7018f2010104��0033��04
0����
늙C�������R���}����һ����늙C�������Rģ�ͻ��A�ϣ����Å������Rֵ�µ�늙Cģ���xɢ�r��ݔ���A�yֵ�c���H늙Cݔ��ֵ�Ě���ƽ����������С��Ŀ�˺������M�е��������ġ�����������ÏV�xKalman�V��[1]����С���˷����z���㷨[2]�Ȍ�����늄әC�����M�б��R�����S���о����������@Щ�����ЏV�x�������V������ȱ�c��ÿ����Ҫ�M��ʸ�������\�㣬Ӌ��������С���˷��ڃ������^����Ҫ�õ�Ŀ�˺�����늙C�����Č������Ҍ��D�������У��z���㷨�^��������ֲ�****���������Ք��Է����y�ڝM���^�߱��R���ȵ�Ҫ������б�Ҫ�о�����Ч���㷨���R����늄әC������
�������һ�N��Ч�Y��ģ�M�˻��㷨�c����Ⱥ�㷨���c���µĻ�σ����㷨�����ڌ�����늄әC�ӑB���Wģ�͵ą����M�б��R�����R�����^���У�����Ⱥ�в�������ͨ�^�w�еõ��µ�Ŀ��λ�ã���������ͨ�^ģ�M�˻��S�C��ӵõ��µ�Ŀ��λ�ã�ÿ������ͨ�^����λ�Ľ��ܸ��ʵ�Ӌ�㣬��Q���Ƿ�Ҫ���_�µ�λ�ã��Ķ�������������Ⱥ��λ�� ��B�����������ģ�M�˻��㷨��Ч�������ֲ�****ֵ�������c����Ⱥ�㷨�Ŀ��ٌ�����������Y�ϣ��������ˌ�����늄әC�ӑB���Wģ�ͅ������R�ľ��ȡ�
1ģ�M�˻��㷨(sA)�c����Ⱥ�㷨(PSO)��Y������늙C�������R
1.1 SA�㷨
ģ�M�˻��㷨(���º��QsA)�ǻ���mento catl0���������Ե�һ�N���lʽ�S�C����������sA��ijһ�^�ߵij����_ʼ�����þ��и���ͻ������Metmpoһ1is��Ӝʄt�ڽ���g���S�C���������S�ضȵIJ����½����؏ͳ���^�̣���K�õ����}��ȫ��****�⡣
SA�㷨��һ�㲽�E�飺
Stepl�����x��ʼ��x0��xi=x0��k=0��t0=tmax(��ʼ�ض�)��
Step2�����I��N(xi)���S�C�xһֵxj��Ӌ���fij=f(xj)-f(xi)������fij��0���txi=xj����t��exp(-��fij/tk)>r()�r���txi=xj���؏�Step2��Lk�Σ�
Step3��Ӌ��tk+1��k=k+1�����M��Kֹ�l�����KֹӋ�㣻��t���Dstep2��
1��2 PsO�㷨
������Ⱥ�㷨(���º��QPsO)�㷨�У���D�S����g��ÿ�����ڽ⿴����һ�����ӣ�����Ӌ��r�����ڽ���g�a��m�����ӣ�����Ⱥ�ĵ�i�����ӵ�λ���������=(xil,x2,����xid)���ٶ�����vi=(vil��vi2������viD)��ԓ����������������****λ��ӛ��pi=(pi1,Pi2��...��piD)����������Ⱥ��������****λ��ӛ��Pg=(pg1��Pg2����PgD)������Ⱥ�㷨�Ļ����M�����̿ɱ�ʾ���£�
ʽ�У�t�����������c1��c2��W�����ӣ�һ��c1=c2=2��O��r()��0��1֮�g��������S�C���������w���^�̴���һ��****�ٶȣ���Ӌ������ٶȴ�С���^�@��****ֵ���t��****�ٶȁ����档
�������ӵ��w���ٶ�Ӱ��㷨��ȫ���Ք����ܣ�Y��shi��R��c��Eberh��t�ڻ����M�������������ˑT�ԙ����w�õ�wPsO������M�������£�
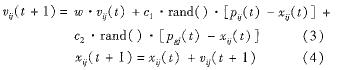
ʽ(7)��ʽ(9)�У�D=d/dt��uqs�քe��d��q�S����늉���udr,uqr�քe��d��g�S�D��늉������ӵ�����ֵ��ids,iqs�քe��d��g�S���������idr,iqr�քe��d���S�D����������ӵ�����ֵ��Rs�鶨��ÿ����裻R�����D��ÿ����茦���ӵ�����ֵ��Ls�鶨��ÿ��늸У�Lr���D��ÿ����늸Ќ����ӵ�����ֵ��L���鶨��ÿ�༤��늸У���r���D��늽��ٶȣ�Te�� |