��(n��i)Ƕʽsma늙C(j��)���O(sh��)Ӌ(j��)�c��ģ
�� �P��������
���A��������W(xu��)������ ��h 430074��
ժ Ҫ�������˂��y(t��ng)sma늙C(j��)�IJ��㣬���ڴ˻��A(ch��)�������һ�N���͵ă�(n��i)Ƕʽ늙C(j��)�Y(ji��)��(g��u)�����ƵĘәC(j��)������Ь�p��ݔ��λ�ƴY(ji��)��(g��u)�o�������ƺ�(ji��n)�ε��T����(y��u)�c(di��n)��
�P(gu��n)�I�~���Π�ӛ���Ͻ��Π�ӛ��Ч��(y��ng)����(n��i)Ƕʽ��늙C(j��)
�ЈD���̖(h��o)��tm301 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1001-6848(2000)05-0007-03
1 �� ��
�S���F(xi��n)�������I(y��)�e���͙C(j��)���˺�Ӌ(j��)��C(j��)���g(sh��)���w�ٰl(f��)չ����(du��)�w�eС�������p�������ܶ�늙C(j��)�������c�Մ�����Ȼ�����y(t��ng)���ŷ�늙C(j��)����һ�����ȵͣ���횰��b���h(yu��n)�x�(q��)��(d��ng)�c(di��n)�ĵط�������늙C(j��)�����\(y��n)�к����Мp���X݆�����ٶȣ���ʹ����(d��ng)ϵ�y(t��ng)��(f��)�s���Y(ji��)��(g��u)��٘���@Ȼ�������ܝM���@һҪ���˂����Ƴ����ù��ܲ��Ϙ�(g��u)�ɵ�����늙C(j��)����ӛ���Ͻ�늙C(j��)�����Ч��(y��ng)늙C(j��)�������s늙C(j��)�ʹ�����s늙C(j��)�ȡ����У���늡������s�ʹ�����s늙C(j��)����(y��ng)�ٶ��^�죬��ݔ��λ��С��ʹ���ܵ���һЩ���ơ����^���ԣ��Π�ӛ���Ͻ𣨺�(ji��n)�Qsma��늙C(j��)ݔ��λ�ƴ�ͬ�r(sh��)���^�ߵĹ���һ�����ȣ����ЏV韵đ�(y��ng)��ǰ��[1]��
sma늙C(j��)�ĽY(ji��)��(g��u)��ԭ�����\(y��n)�п��Ʒ�ʽ���c���y(t��ng)늙C(j��)��ͬ����������sma���Ϫ�(d��)�ص��Π�ӛ��Ч��(y��ng)(��(ji��n)�Q��sme)���o��һ����ƫ��(d��ng)�b�ã����ɻ����w����ͨ�^�ض��Ŀ����ֶΣ���(g��u)���p�̿�����(d��ng)Ԫ������(sh��)�F(xi��n)���������D(zhu��n)�Q�����@�N���x�ϣ��ԷQ���늙C(j��)��
2 ����ԭ��
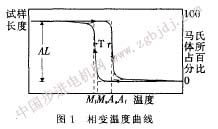
sma��һ�N����Ĺ��ܲ��ϣ����˼�x���������(xi��ng)Ŀ��������Ȼ�ƌW(xu��)�����Y���(xi��ng)Ŀ(59877004)��ӛ���Π�����������������|(zh��)�ǺϽ���(n��i)������׃�Y(ji��)�������������^���У�ͨ�^�ض������̎����ӛ��һ�����Π�ؕ͜r(sh��)�����ϵ�������(qi��ng)���^�ף�ʩ����ӑ�(y��ng)�����a(ch��n)��������׃��ȥ����(y��ng)����׃���ౣ�������ߜضȣ��Ͻ�l(f��)����׃��������׃��ʧ���֏�(f��)����ӛ�����Π�D1��smaԇ���L(zh��ng)�ȼ��R���w��ռ�ٷֱ��c�ضȵ��P(gu��n)ϵ����2������m��mf���R���w��׃���_ʼ�ͽY(ji��)���r(sh��)�Ĝضȣ�a����af������׃����ʼ�ͽY(ji��)���ضȣ��˂�ͨ������׃�ض�af�����Ͻ�����ԡ�
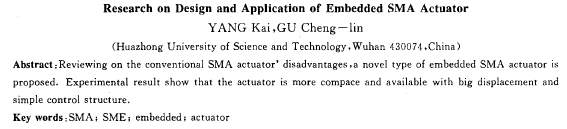
 ��?y��n)�Ͻ�������Ԫ�������Կ�������ֱ�Ӽӟ�ķ���ʹ�����ء�һ�㣬�Ͻ��Іγ̺��p��֮�֡�ֻ�ڼӟ�r(sh��)�a(ch��n)���Π�֏�(f��)�Ğ�γ̣��ӟ����s���ɮa(ch��n)���Π�֏�(f��)�Ğ��p�̡��γ�sma��****�ɻ֏�(f��)��׃��****��׃�֏�(f��)�������p�̵�Ҫ��֮�γ̺Ͻ����^�ߵ�ѭ�h(hu��n)ʹ�É��������Ԍ�(sh��)�H��(y��ng)����smaһ���džγ̵ġ��o�s���r(sh��)���γ̺Ͻ�ֻ�ܮa(ch��n)��1���Π�֏�(f��)����s�o���@׃������Ҫ��ѭ�h(hu��n)��(d��ng)������횼���ƫ��(d��ng)�b�ã�ʹ֮�a(ch��n)���A(y��)׃�Ρ��̽y(t��ng)��sma늙C(j��)��ƫ��(d��ng)�b�Þ�ƫ�Ï��ɻ�sma�z��ǰ�ߞ�ƫ��(d��ng)ʽ�����ߞ���(d��ng)ʽ���D2��ƫ��(d��ng)�Ͳ��(d��ng)���D(zhu��n)ʽsma늙C(j��)ʽʾ��D[3]��
���Կ��������y(t��ng)��sma늙C(j��)��?y��n)��?d��ng)��ƫ��(d��ng)��Ԫ���x���Y(ji��)��(g��u)��Ȼ����o�����@һ�����γ���sma늙C(j��)���ͻ�ϵ�y(t��ng)���M(j��n)������(y��ng)�õ�ƿ�i�������@һ�c(di��n)i�ڇ������P(gu��n)�о��Ļ��A(ch��)�ϣ������һ�N���͵ĽY(ji��)��(g��u)����(n��i)Ƕʽ����(n��i)Ƕʽsma늙C(j��)����Ҫ˼·�ǣ��ù����zȡ��ƫ�Ï��ɣ��ڹ����z�Ƴɵď����(n��i)Ƕ��ni- tisma���ģ�ʹ���w��ͨ늕r(sh��)�a(ch��n)���ď���׃���ڔ�늺����л֏�(f��)����(n��i)Ƕʽ�Y(ji��)��(g��u)�o�����������z�߷��Ӳ����ܼӿ�sma�z����s����߷���(y��ng)�ٶȡ�
3 ����ģ��
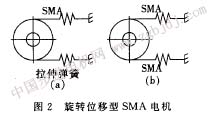
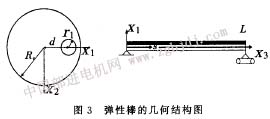
����(d��ng)�����О���sma�ӟ���sѭ�h(hu��n)�r(sh��)��(y��ng)��ƽ��ĽY(ji��)����ƽ�ⷽ�̿ɮa(ch��n)���϶Ⱥ���(sh��)������λ�ü�sma�D(zhu��n)׃��(y��ng)׃�ĺ���(sh��)[4]���麆(ji��n)�����������]��D3�ď����ߴ硣smaƽ���ڰ��w�S��x3Ƕ�룬���xԓ�S��d��sma�ӟ��տs����?y��n)�Ͻ��c�������S���غϣ������Ƀ��߱�������a(ch��n)���ď��ؿ�ʹ���w��������һ�μӟ���sѭ�h(hu��n)�Ą�(d��ng)������ǣ�
a������ğo��ӑ�(y��ng)���r(sh��)�_ʼ��
|