����Ԫ�W�j�M�Ю���늙C�D�ٵı��R��Ӌ
�R����
�������Ƽ��WԺ��������� 710054��
ժҪ����������늄әCֱ���D�ؿ���ԭ��������˲����˹���Ԫ�W�j�ٶȱ��R����ȥ���F�o�ٶȂ������Ľ����{�ٿ���ϵ�y�����н�B�ˮ���늄әCֱ���D�ؿ��ƵĻ������̺��W�j�ٶȱ��Rģ�͡�����Y��������ϵ�y�������õ����ܡ�
�P�I�~���o�ٶȂ��������W�j���ٶȱ��R��ֱ���D�ؿ���
�ЈD���̖��tm921 �īI���R�a��a ���¾�̖��1001-6848(2000)05-0016-03
l �� ��
�o�ٶȂ���������늙C�{������ϵ�y�ѳɞ鮔ǰ�о��ğ��c��ͨ�����߄ӑB���ܵĮ���늄әC�����{�ٿ���ϵ�y����Ҫ���b�c늄әCͬ�S���ٶȂ������Ԙ����ٶ��]�h�����ǣ����������еĈ��϶��m�˰��b�ٶȂ������ġ���ˣ�ȡ���ٶȂ����������ܱ���ϵ�yԭ�еĸ߄ӑB���ܣ���늚�����I���һ헺������x���n�}��
�ڟo�ٶȂ���������늙C�{�ٿ���ϵ�y�У��ٶȷ�����̖�����_���R��Ӌ�dž��}���P�I���ڡ�ͨ�^�y������늉����������̖��Ӌ���ٶ��DZ��R��Ӌ���A���ڴ˻��A���������S�����������늙Cģ��ֱ��Ӌ�㷨���D���l���g��Ӌ�㷨��ģ�ͅ������m�������D���X�C�������������V�����ȡ�
�˹���Ԫ�W�j���нY�����Ρ�����Ӌ�㡢�ֲ�ʽ�惦���ԌW���������������ԏ������c����ˣ�����������ѽ��_ʼ�����ڽ���늙C�{�ٿ���ϵ�y�С����IJ����˹���Ԫ�W�j��Փ�M���ٶȱ��R����һ�Nֵ���о����·�����
�^ȥ���˂��о������c��Ҫ������ʸ�����Ƶğo�ٶȂ���������늙C�{��ϵ�y�ϣ�������������늙Cֱ���D�ؿ���ԭ�혋�ɵğo�ٶȂ���������늙C�{��ϵ�y�о��ñ��^�١����Ľ�B�����Cֱ���D�ؿ��Ƶğo�ٶȂ����������{��ϵ�y��
2ֱ���D�ؿ��ƻ�������
1985�꣬��������Wm. depenbrok����ͨ�^��˲�r���g��Փ���о�������ˮ����Cֱ���D�ؿ�����Փ��ֱ���D�ؿ��Ʋ��ö��Ӵň�����ֱ�����oֹ����ϵ��Ӌ�㽻��늙C���D�أ�������bang -bang���Ʈa��pwm��̖����ʹ�D��푑�������1���ԃȣ�����׃���_�P��B�M���ɼѿ��ơ���ˣ�����ϵ�y�o�ӑB���ܶ����^�ߣ����J�����^ʸ�����ƺ�������늙C�{�ٿ�����Փ��1���w�S[1]��
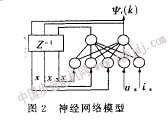
����ֱ���D�ؿ�����Փ������늙C���oֹ����(a��p)����ϵ�µ�늉����̞飺
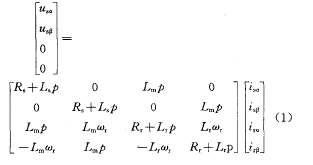
��朷��̞飺
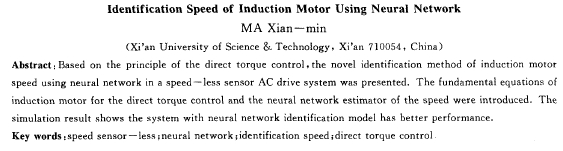
3�W�j�ٶȱ��Rģ��
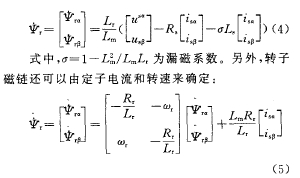
��������늙C���oֹ����(d��p)����ϵ�µĔ��Wģ�ͣ��D�Ӵ�朿����ɶ���늉��Ͷ���������_��[2]��
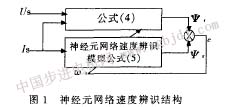
���ʽ(4)�c�ٶȟo�P���������������˜ʴ���^�y���Ԯa��������朡���ʽ(5)�����ٶȣ��������������˹���Ԫ�W�j�ٶȱ��Rģ�ͣ��Ԯa����Ӌ��朡���������c��Ӌ��朵��`�����鷴���������̖���Á��{����Ԫ�W�j�ę��ӣ�ԓ���Ӿ����ٶ���̖�����`��С��һ���A���O�õ��ֵ�r�����ӹ̶����ٶ���̖�㱻���R��������Ԫ�W�j�ٶȱ��R����Dl��ʾ��
�òɘ��l�ʶ���ʽ(5)�M���xɢ��̎������ʸ�����_ʽ�飺
�`��̞飺
|