���M(j��n)늙C(j��)��(x��)�ֿ��ƺ���(sh��)���������о�
��־�����S���飬����ͩ
(�ڶ��ڱ����̌W(xu��)Ժ����� ���� 710025)
ժҪ���ڲ��M(j��n)늙C(j��)���߷ֱ��ʼ�(x��)���(q��)��(d��ng)ϵ�y(t��ng)�O(sh��)Ӌ(j��)�У����˴_�����ؽǵľ����ԣ���Ҫ��(du��)�̻���eprom�еļ�(x��)
�ֿ��ƺ���(sh��)ֵ�M(j��n)�������������O(sh��)Ӌ(j��)��һ�N��(x��)�ֿ��ƺ���(sh��)�Ԅ�(d��ng)����ϵ�y(t��ng)������������˻���ţ�D��ֵ��������������
�P(gu��n)�I�~�����M(j��n)늙C(j��)����(x��)�֣�������ţ�D��ֵ��
�ЈD���̖(h��o)��tm274 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1001-6848(2000)05-0025-04
1 �� ��
��a2060- 9212�̓�����ʽ���M(j��n)늙C(j��)16λ���߷ֱ��ʼ�(x��)���(q��)��(d��ng)ϵ�y(t��ng)�O(sh��)Ӌ(j��)�У������ˡ����ʸ������������D(zhu��n)���ļ�(x��)�ַ���������Փ�ϱ��C��ʧ�{(di��o)�Ǻ����ؽǵľ����ԣ�����(d��ng)���]�����M(j��n)늙C(j��)�ķǾ��Ժʹ�·͵����ص�Ӱ푕r(sh��)����ʹ�����@�M��(y��n)������������Ҏ(gu��)��ͨ늣���(sh��)�y(c��)�IJ��M(j��n)늙C(j��)�D(zhu��n)�ӵĽ�λ���c����ֵ����һ���ľ��@�Ӿ���Ҫ��(du��)�@�M���ֵ�M(j��n)�Ѓ�(y��u)��������(du��)�̻���eprom�еļ�(x��)�ֿ��ƺ���(sh��)�M(j��n)��������
2 ����ľ�����
a2060- 9212�Ͳ��M(j��n)늙C(j��)16λ���߷ֱ��ʼ�(x��)���(q��)��(d��ng)ϵ�y(t��ng)�O(sh��)Ӌ(j��)�У���ͨ�^(gu��)��(du��)늙C(j��)a��b�����@�M�������������(l��i)��(sh��)�F(xi��n)��������ϳ�ʸ���ġ�������������M(j��n)���D(zhu��n)�ġ������@�M����Ĕ�(sh��)�W(xu��)ģ�ͱ�ʾ�飺
�����ؽǞ飺
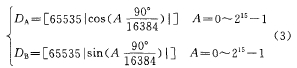
��(x��)�ֿ��ƺ���(sh��)�l(f��)����eprom�й̻���(sh��)��(j��)da.db�������飺
ʽ�з���̖(h��o)[]��ʾ�����������롱��ʽȡ����a��eprom��ַݔ�롣
��(du��)eprom�M(j��n)�Д�(sh��)��(j��)�̻���ͨ�^(gu��)��µ������Ӌ(j��)��C(j��)���̿�������ɵġ���µ���̻����Ô�(sh��)��(j��)����c�Z(y��)�ԡ�����ʽ(3)��ʾ��(sh��)�W(xu��)ģ�;��̫@�ã���(sh��)��(j��)�惦(ch��)��ʽ��2�M(j��n)�ƣ���ˣ����c��Փ���ƺ���(sh��)�ĔM�ϳ̶��Ǻܸߵģ������f(shu��)����Փ�ϱ��C�˶�������ϳ�ʸ���ķ�ֵ�c���gλ�õķ�(w��n)����
����(sh��)�H��r�ǣ���϶�ň�(ch��ng)�Ƕ��Ӵń�(sh��)�c�D(zhu��n)�Ӵ��ͨ�^(gu��)�ߡ��D(zhu��n)���F�Ĺ�ͬ�Б�(y��ng)�ĽY(ji��)����Ҫ��(f��)�s�öࡣ�����X�ۡ��F�IJ��ϡ�߅��l�������صĴ��ڕ�(hu��)��(d��o)��϶�ň�(ch��ng)ƫ�x�A(y��)�ڣ��@��ʹ��϶�ň�(ch��ng)���ܸ��S����ϳ�ʸ���������D(zhu��n)��Ҳ���y�Ա��ַ�ֵ�㶨�����ң�����ؓ(f��)�d����Ҳ���S�r(sh��)׃��������ʹ�ڿ��d��B(t��i)Ҳ��?y��n)��S�еȹ̶������b��(li��n)�ӵIJ���������һ����Ħ�����أ������늙C(j��)��ʧ�{(di��o)��Ҳ�S֮׃�����@���_(k��i)�h(hu��n)ϵ�y(t��ng)���ǟo(w��)���m���ġ���ˣ��T�����ص�Ӱ�ʹ���D(zhu��n)�ӵ�λ����һ��������(n��i)�Dz��_���ģ����D(zhu��n)����һ���̶����ǟo(w��)����(sh��)�F(xi��n)�������D(zhu��n)�ġ�
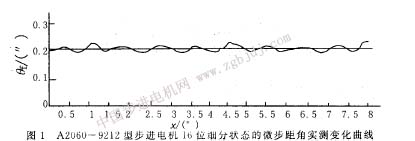
�D��1��ʾ��a206_0- 9212�Ͳ��M(j��n)늙C(j��)16λ���߷ֱ��ʼ�(x��)��������ǜy(c��)ԇ�Y(ji��)��׃���������ɈD�п���ֱ�^�ؿ�������Dz����������dz������Բ���(d��ng)�ģ���ÿ����(0.9��)һСѭ�h(hu��n)��ÿ�X��(3.6��)
ԇ�(y��n)�y(c��)��Ҳ���㣬�D(zhu��n)�ӵ����M(j��n)�Dz�����ģ��ʬF(xi��n)�����@�������Բ���(d��ng)���ň�(ch��ng)��߅��l�����X����r���������؏�(f��)�nj�(d��o)�������������׃���ĸ���ԭ��ͬ�r(sh��)�����ɱ����Ħ��ؓ(f��)�d(Ħ�������Dz��㶨�ģ������f(shu��)��һ��������(n��i)Ҳ�Dz��_���ģ��Լ�����ؓ(f��)�d���صIJ���(d��ng)��(d��o)��ʧ�{(di��o)�dz��F(xi��n)��Ҏ(gu��)�t��С׃��(d��ng)��С���S��Ҳʹ����������������Բ���(d��ng)�ϳ��F(xi��n)���⻬��С��X�Ρ� ����(y��ng)ʽ���M(j��n)늙C(j��)���(q��)��(d��ng)�c���ʽ���ƣ����䲻������Ҫ��(y��n)��һЩ��
3����Dz�����?q��)��_(k��i)�h(hu��n)���ƾ��ȵ�Ӱ�
����ǵIJ������ԣ��Լ�ʧ�{(di��o)���Sؓ(f��)�d׃���O |