���β��c���Ҳ���늄ݟoˢֱ��늄әC���Է���
��־���l�����R����
(�������I��W��ꃃɃɰ�710129)
ժҪ��ᘌ���늄ݞ��������β��c�������Ҳ������şoˢֱ��늄әC��������늙C�ڷ�����120o��ͨģʽ�µęCе���ԡ�������Ρ��Q���D���}�ӡ��ƌ��˷�늄ݞ����Ҳ��ğoˢֱ��늄әC�ڷ�����120o��ͨģʽ�µęCе���Ա��_ʽ��ͨ�^���@������늙C������εČ��ȷ����Լ������ߓQ������Ĕ��W�ƌ����o�����@�ɷN��ͬ��늄ݲ��εğoˢֱ��늄әC�ڸ��ٺ͵��ٕr����������Ρ��Q���D���}�Ӳ��ԭ�ʡ������˃ɷN늙C�ķ���ģ�ͣ�����Y���Mһ����C�˷��������_�ԡ����H�����У��oˢֱ��늄әC�ķ�늄ݲ��κ��y�_����������β��������������β��c�������Ҳ�֮�g��ԓ�о����oˢֱ��늄әC���OӋ�c���ƾ���һ���ą������x��
o�� ��
���şoˢֱ��늄әC�ķ�늄ӄݲ��οɷ֞����β���늄ݺ����Ҳ���늄݃ɷN�����β���늄ݵ���(�şoˢ늄әC�����ӕr�Q�����şoˢֱ��늄әC�����Ҳ���늄ݵ����şoˢֱ��늄әC���Ҳ�����ӕr�Q������ͬ��늄әC���ڹ��̌��`�У����şoˢֱ��늄әC�ķ�늄ݺ��y�_����������Ρ����ď���������β������Ҳ��ɂ��O�˳��l�������о��������β���늄ݟoˢֱ��늄әC(���º��Qbldcm)�����Ҳ���늄ݟoˢֱ��늄әC(���º��Qblacm)�ڷ����ӷ�ʽ�µęCе���ԡ���������Լ��D���}����r����oˢֱ��늄әC�Č��H�\���ṩ���������������oˢֱ��늄әC���OӋ�c���ƾ���һ���ą������x��
1�Cе���Ե�Ӌ���c����
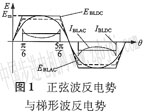
���Ҳ���늄ݟoˢֱ��늄әC�����β���늄ݟoˢֱ��늄әC�ķ�늄ݲ�����Dl��ʾ������ͬ�D����늙C�ķ�늄ݷ�ֵ��ͬ��
1 1�Cе�����ƌ�
bldcm�ęCе������ָ늄әC�Ķ�늉����ֺ㶨�r���D��n�S늴��D��tem׃�����Pϵ���������Թ��ʹܵĹ܉�����Ӌ�㹫ʽ���£�
�����bldcm�У�  ��ʽ(1)���ԸČ��飺 ʽ�У�ke��bldcm��늄�ϵ����r�����@�M��衣
����bldcm��Ӌ�㷽������blacm�ķ�늄ݲ����������ͨ���g��Ч����e��ͬ�����Σ���Ч�Y����Dl̓����ʾ���@�Ӿ͌�blacm��Ч��bldcm�ˡ��O��Ч���늄�ϵ����ke,늙C�D�ٞ�n���t�У�
��늄�ϵ���c�D��ϵ�����Pϵ��֪������ͬ�����r�£�blacm��ݔ���D��׃С�ˡ��������ʽ(2)��blacm�ڷ������µęCе���Ա��_ʽ��
�ɴ˿�Ҋ��blacm�ڷ������µĿ��d�D�ٸ���bldcm�Ŀ��d�D�٣��Cе����ܛ��bldcm��
1��2�Cе���Է���
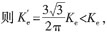
matlah��simulink����ķ������������Է���ؽ����oˢֱ��늄әC�ķ���ģ�͡����ĵķ�늄ݲ�����s�������̵õ���늙C���慢�����£��O������2���D�ӑT����1��10-3kg��m2���@�M����0.3�أ��@�M�Ը�һ���О�o.9 mh��늄�ϵ����0��035 v��s/rad���Դ늉���28 v��
bldcm���~���D��560 r��min���~���D��4 n��m���\���ڃ�����ͨ������������B120o��ͨ��ʽ��blacm��r�䷴늄ݲ����cbldcm��һ���⣬������������ͬ���D2�o���˃ɷN늙C�Cе���Եķ����cӋ��������blacm�ęCе����Ӌ��Y���c����Y��������f����ЧӋ���Ǻ����ġ������ڛ]�п��]늸Ќ��Cе���Ե�Ӱ푣�����Y����Ӌ��Y��֮�g������һ�����`�
2�Q������ķ����cӋ��
���oˢֱ��늄әC�\���ڃ�����ͨ��������B120 o��ͨ��ʽ�r��ÿ����B����60 o늽Ƕȡ�ÿ����B�ֿɷ֞錧ͨ�\�Ѕ^�͓Q���\�Ѕ^����ͨ�\�Ѕ^�У� |