c
�S��ϼ�����F���t��
(�A���r�I��W���̌WԺ���V��510642)
ժҪ��ᘌ�����늙C�Ŀ������c����Ŀǰ�ڹ��I�I���ЏV�鑪�õĽM�Bܛ���ͷֲ�ʽ�����ɼ�����ģ�K�c�����Ƶij���늙C�ӿ���ϵ�y�Y���������M�����ڽM�Bܛ���ij���늙C�y��ϵ�y��ͨ�^pc�C���ں��I�Ô����ɼ�����ģ�K���FͨӍ�����Ƴ������ij���Ϳ��ƽ��档ԓϵ�y�܉F����늙C�{�١��\�ӿ��ơ��ٶșz�y�Ͷ�λ���ơ����Y���������OӋ���{�l�{���ӿ���ϵ�y�������{���Ϳ��ƣ��܉�M�㲻ͬ�l�ʵ�ֱ��늙C�����D늙C�����c����Ҫ��ϵ�y�����^�õķ����ԡ�
�P�I�~������늙C���ӿ��ƣ��M�Bܛ��
�ЈD���̖��tm359. 9 �īI��־�a��a ���¾�̖��1001-6848{2010)03-0042-03
o�� ��
����늙C���е��١����D�ء��w�eС��푑��ٶȿ졢λ�ơ�����늴ň���Ӱ푡�������i���OӋ���ɶȴ�����c���ڼ���������C���ˡ�
�k���Ԅӻ����I��ɞ������ðlչǰ�������b��[1-5]������늙C������̖��Ҫ���^�ߣ�����늙C�Y���_���Ժ��������������Hȡ�Q��늙C�����������ںܴ�̶���ȡ�Q�����·���OӋ������늙C�S���ض����ߣ�늙C�\�Зl�����l��׃����늙C���C���l�ʕ��a��Ư�ƣ��ڸ߾��ȶ�λ���Ϻ��y�õ��M��Ŀ������ܣ���Ҫ�����ܵĂ�������늙C�M���]�h���ơ�������W�ߞ���Ƴ���늙C���ܣ�������늙C�����c�������˴����о�[6-10]��
�Ŀ��Ʒ��濴�����ڳ���늙C�Ŀ���׃���c�D�ټ�ؓ�d֮�g�ď��s�Ǿ��ԣ�����늙C��늴�늙C�Ŀ��Ƹ��y����˱��ĽY�ϽM�Bܛ���о�����늙C�����c���Ƽ��g��
1�ӿ���ϵ�yӲ���·
1.1ϵ�y�Ŀ��w�Y��
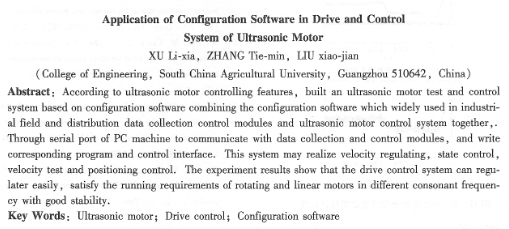
����늙C��ϵ�y��Ӌ��C���ӿ��D�Qģ�K��늙C����ģ�K�����l�D�Qģ�K��늙C��ģ�K�������z�yģ�K�͂������M�ɣ�ֱ������늙C�ӿ���ϵ�y��D1��ʾ��
��Ӌ��C�l������̖��ͨ�^����ģ�Kݔ������늉��������l�D�Q�·�ѿ���늉��D�Q���·���l���ҽ�����̖�ӳ���늙C��
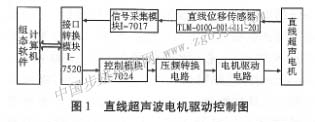
1.2�{�l�ӿ����·
ϵ�yͨ�^�{��늙C�����l�ʌ��F�D�ٿ��ƣ��·��D2��ʾ���{�l�·���ÃȲ����Љ�����ʎ��(vc0) cd4046�a��������̖���·���Է���Č��F�l���{������·�Y�����Σ��������l�ʶξ��ɫ@�úܺõķ����ԡ�vc0��ʎ�l�ʵķ�����rl��r2��ci�Q����
�������C���l����20 khz~ 100 khz�����ij���늙C�����Ҫ����̖�l����ݔ��������̖�l����80 khz~ 400 khz֮�g���m���{��ri��
r3��ci�ą���ֵ�����{��ݔ��������̖���l�ʷ�����һ��cd4046��****�l�ʞ�1 2 mhz( vcc=15 v)��
�����·���p����λ�Ĵ���40194���F��������ʎ���a���l�ʿ��{�ķ�����̖����40194�ĕr���̖��ÿݔ��һ���}�_��̖��ݔ���˵��Ă���B��׃��һ�Σ�������λ�������90�ȡ��ɿ��ƶ�5����so�Ġ�B�M�ϣ����Ԍ��F40194ݔ����̖������늙C�����D�����D���ơ�������̖���p����λ�Ĵ���40194̎����ݔ���˵õ�4·��λ��90�ȵķ�����̖���ô���̖�Ӄ�·���칦���·�����Եõ���λ���90�ȵă�·���l������̖����ȫ�M�㳬��늙C������Ҫ��
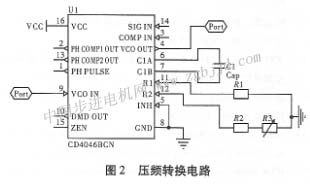
�{�l�{�ٿ����·�п���늉��c����̖�l�ʵ��Pϵ����Ҋ�D3��ʾ��
�D3������ݔ��늉���1. 50 v��10. 50 v������vco��ݔ����̖�l���cݔ�����늉������ȣ����б��^�õľ��Զȣ��˕r����늙C����̖���l�ʞ�17. 40 khz~ 83. 28 khz���M���о�������늙C���ӿ���Ҫ����ݔ��늉�����1. 50 v�����10. 50 v�r�������^늉���
|