����tms320f2812�Į���늙C(j��)ʸ������ϵ�y(t��ng)
���У�Մ���ɣ�������
���Ї�(gu��)�ƌW(xu��)Ժ늹��о���������100190��
ժҪ�����y(t��ng)��ʸ�����Ʒ������ڮ���늙C(j��)�ķ�(w��n)�B(t��i)ģ�ͣ�����������늙C(j��)�ą���(sh��)Ӱ푺ܴ����½Y(ji��)�Ϯ���늙C(j��)�����Ժ�Ҫ���ڿ��Ʋ������O(sh��)Ӌ(j��)���D(zhu��n)�٣��������朵ȶ���(g��)�]�h(hu��n)�������ˌ�(du��)����(sh��)��ه�Ժ�С��ƫ��늉����ʽ�����Y(ji��)��늙C(j��)��늉�ģ�ͺ����ģ�͌�(du��)���y(t��ng)���D(zhu��n)�Ӵ��Ӌ(j��)���M(j��n)�����a(b��)������������Ч�ؽ��ͅ���(sh��)׃����(du��)ϵ�y(t��ng)��Ӱ푡�dspоƬ��ims320f2812������(qi��ng)����\(y��n)�������̓�(y��u)���������ܣ�����ԓоƬ��Ӳ��ϵ�y(t��ng)�ܺõČ�(sh��)�F(xi��n)�˿��Ʒ�������(sh��)�(y��n)����ԓ����ϵ�y(t��ng)���ȸߣ���(sh��)�r(sh��)�Ժ̈́�(d��ng)푑�(y��ng)���^�á�
�P(gu��n)�I�~��ƫ��늉����ʸ�����ƣ��D(zhu��n)�Ӵ�朣�tms320f2812
�ЈD���̖(h��o)��tm343; tp273 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848(2010)03-0060-04
0�� ��
ʸ�������㷨�д���ʹ����늙C(j��)����(sh��)�������\(y��n)����늙C(j��)����(sh��)׃���ܴ����D(zhu��n)�����****׃�����_(d��)50 010���O���Ӱ��˿���ϵ�y(t��ng)���ܡ������������(sh��)��׃����(du��)����������ɵ�Ӱ푳ɞ�ʸ�������е�һ����Ҫ�n�}�����˽�Q�@һ���}���ܶ��W(xu��)����늙C(j��)����(sh��)�ھ����R(sh��)�������˴����Ĺ������īI(xi��n)[1-4]��B�ˎN��Ҋ��늙C(j��)����(sh��)�ھ����R(sh��)��������Ҫ�ДU(ku��)���������V����( ekf)��ģ�ͅ������m��(y��ng)��( mrac)����(j��ng)Ԫ�W(w��ng)�j(lu��)��(ann)�ȵȣ����@Щ�����㷨��(f��)�s����Ҫ������(sh��)�r(sh��)Ӌ(j��)�㣬���Һܶ���������\(y��n)��h(hu��n)��(ji��)�����a(ch��n)���\(y��n)��Y(ji��)���ġ�ë�̡��F(xi��n)���īI(xi��n)[5]�ڿ��ƭh(hu��n)��(ji��)�м���������]�h(hu��n)��(l��i)�a(b��)�����څ���(sh��)׃��������D(zhu��n)�Ӵ���`���������(j��)늙C(j��)�����ģ�ͣ��ڵ��ٕr(sh��)�a(b��)��Ч�����ѡ�
���ĸ���(j��)�]�h(hu��n)��(du��)����(sh��)׃�����еֿ����ã��ڿ��Ʋ������O(sh��)Ӌ(j��)���D(zhu��n)�٣��������朵ȶ���(g��)�]�h(hu��n)��늉�����h(hu��n)��(ji��)�����ˌ�(du��)늙C(j��)�D(zhu��n)�Ӆ���(sh��)��ه�Ժ�С��ƫ����ʽ�����ҽY(ji��)����늙C(j��)��늉�ģ�ͺ����ģ�͌�(du��)�����еĺ���׃�����D(zhu��n)�Ӵ�朣��M(j��n)�����a(b��)�����������Ķ��@�^��(f��)�s�ą���(sh��)���R(sh��)�h(hu��n)��(ji��)�������늙C(j��)����(sh��)׃����(du��)����ϵ�y(t��ng)��Ӱ푡�����dspоƬtms320f2812��(sh��)�F(xi��n)��ԓʸ������ϵ�y(t��ng)��ܛӲ���O(sh��)Ӌ(j��)��ȡ�����^�õČ�(sh��)�(y��n)�Y(ji��)����
1 �D(zhu��n)�Ӵň�(ch��ng)ֱ�Ӷ���ʸ������ԭ��
ʸ�������ж��Ӵň�(ch��ng)����϶�ň�(ch��ng)���D(zhu��n)�Ӵň�(ch��ng)���N�ň�(ch��ng)����ʽ���@������D(zhu��n)�Ӵň�(ch��ng)�����Ԍ�(sh��)�F(xi��n)��(du��)����������D(zhu��n)�ط����̈́�(l��)�ń�(w��)���Ľ��ͨ�^3/2׃�Q�����D(zhu��n)׃�Q���Եõ�����늙C(j��)�����D(zhu��n)����tms320f2812�Į���늙C(j��)ʸ������ϵ�y(t��ng)���У����Ӵ�朞�d�S���c֮��ֱ�ҳ�ǰn/2����?y��n)�g�S�����D(zhu��n)����(bi��o)�µĔ�(sh��)�W(xu��)ģ�͡�
�ڌ�(sh��)�H�����п�������pi�{(di��o)��(ji��)�����Ķ��@�_����(sh��)��(du��)����M(j��n)����Ч���ơ����w�㷨���£�
����ʽ(1)��ʽ(2)���Կ���d�S��g�S�g������ϡ�Ҫ���������������Ӱ푱�회�(du��)d��g�S늉��M(j��n)�н��Ŀǰ���W(xu��)�߹�������N��������������ǰ�����ƫ�������IJ���ƫ�����ķ�����ͨ�^����o����̖(h��o)�c������̖(h��o)�IJ�ֵ�M(j��n)��pi�{(di��o)���(l��i)�����������
��pi�{(di��o)��(ji��)���뵽����늉��(xi��ng)��Ӌ(j��)���У����H���C�˸����\(y��n)�Еr(sh��)ϵ�y(t��ng)���S�o��׃�����{(di��o)��(ji��)����������푑�(y��ng)�o����׃��������Ҫ����늙C(j��)�\(y��n)���У��D(zhu��n)�������D(zhu��n)��늸е�׃���dz���ƫ�������_���@�ɂ�(g��)����(sh��)������(qi��ng)��ϵ�y(t��ng)��(du��)늙C(j��)����(sh��)׃���ĵֿ�������
2��(du��)�D(zhu��n)�Ӵ��Ӌ(j��)���c���Ƶĸı�
��ʸ���������D(zhu��n)�Ӵ���ʹň�(ch��ng)������գ����nj�(sh��)�Hֵ��Ȼ���@�ɂ�(g��)�������y��ֱ�Ӝy(c��)���ģ����ֻ�ܲ����^�y(c��)ֵ��ģ��Ӌ(j��)�㡣�����y(t��ng)���^�y(c��)��������(j��)��늙C(j��)ģ�ͷ�����ه��늙C(j��)����(sh��)�����_�ԣ��܅���(sh��)׃��Ӱ푺ܴ��˽�Q�@��(g��)���}�ܶ��W(xu��)����늙C(j��)����(sh��)�ھ����R(sh��)�����M(j��n)���˴������о��������@�(du��)���y(t��ng)���D(zhu��n)�Ӵ��Ӌ(j��)��Ϳ����M(j��n)�и��M(j��n)�����һ�N�µ��D(zhu��n)�ӿ��Ʒ����Ķ��@�^����(sh��)�ھ����R(sh��)��ʹϵ�y(t��ng)���\(y��n)���в��܅���(sh��)׃����Ӱ푡�
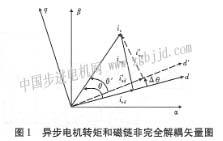
��D1��ʾ��������늙C(j��)ģ���У��҂���d�S�c�D(zhu��n)�Ӵ����ȫ�غϣ���机��D(zhu��n)�،�(sh��)�F(xi��n)��ȫ�������(sh��)�H�\(y��n)���У�����늙C(j��)����(sh��)��׃���g�ӌ�(d��o)���D(zhu��n)�Ӵ�� |