����arm�����_��X�����M늙C�����о�
�λۣ��Y����Ԭ韣��� �s
���Ї���ý��W�Ԅӻ�ϵ������100024��
ժҪ�����_��X���܉������_�τ������������ğ���Ч�����ǬF�����_�������Ȋʘ���������ȱ�ٵ����ܟ��ߡ�ᘌ����y��51��Ƭ�C��X������ϵ�y�IJ��㣬�����Ƕ��ʽlinux��arm̎����������X���Ŀ��ƺ��ģ��������_�����O�ò��M늙C�ӳ����Ԅӌ���X�����M늙C�M�п��ƣ����F�����_��X������ɵĹ��ܡ�
�P�I�~�����_��X����Ƕ��ʽlmux�����M늙C�����·
�ЈD���̖��tm383. 6 �īI��־�a��a ���¾�̖��1001-6848(2010)03-0098-03
0�� ��
���y����ܟ��Ŀ��Ʒ������Æ�Ƭ�C���Ʋ��M늙C�������چ�Ƭ�C��ϵ�y٘Դ���\���ٶȺʹ惦���g�����ƣ�ÿ����Ƭ�C���ƵIJ��M늙C�Ĕ����^�٣���ÿ�_��X��������Ҫ�ܶಽ�M늙C��arm�{���S����ϵ�y�YԴ���ߵ��\���ٶȣ����m��������X�����M늙C��̎������һ��arm���Կ��Ƹ���IJ��M늙C����Ƕ��ʽ��linuxϵ�yؓ؟Ƕ��ʽϵ�y��ȫ��ܛ��Ӳ���YԴ�ķ��䡢�{�ȣ����ڌ��r�ԡ�Ӳ�������P��ه�ԡ�ܛ���̻��Լ����õČ��I�Եȷ�������^��ͻ���ă��c���������c�U��Ƕ��ʽlinux�IJ��M늙C�ӳ����
�OӋ[1]��
1 ϵ�yӲ���·�OӋ
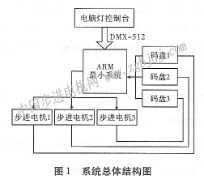
���˱����f������ϵ�y�Hʹ��3�_���M늙C�����ơ���X�������_�ͳ�dmx-512��̖��arm�·����յ�ԓ��̖���M��̎�����D�Q���������M늙C���}�_��̖��ʹ���M늙C���F�����Ą������M�����F��X���Ą��������˷�ֹ���M늙C���F©�����c���M늙Cͬ�S���ôa�P�z�y���M늙C�Ƿ�Ҫ��ʴ_������������F՛����ͨ�^ƫ���M���{����ϵ�y�·�Y����D1��ʾ��
1.1�ӿ�оƬa3972
���OӋ���x�Ã����ľ����ʽ���M늙C42bygh107���~�������0.4 a������Ǟ�1.80�����õĽӿ�оƬ��a3972��a3972��allegro���~���a��һ���pdmosȫ�������}���{��(pwm)���M�R�_�Ӽ����·������cpuͨ�^3�����r犡��������xͨ�����нӿڌ����M�п��ƣ����O�ò��M늙C���\�D�����N��ͬ�IJ��M���������ൽȫ���ӣ��������M늙C���D�ؿ��ƾ��кܴ���`����[2��3]��
1.2���M늙C9200muioʹ������
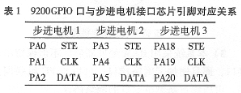
��ϵ�y�У�3�����M늙C�ӿ�оƬ��a3972��Ĵ��нӿڵ�3�����_ste��ʹ����̖�ˣ���clk���r���̖�ˣ���data������ݔ����̖�ˣ��քe�cat91rm9200��gpio�����B�������Pϵ���l��ʾ��at91rm9200̎������pao��pa1��pa2�Ӳ��M늙C1�ӿ�оƬ���������_��pa3��pa4��pa5�Ӳ��M늙C2�ӿ�оƬ���������_��pa18��pa19��pa20�Ӳ��M늙C3�ӿ�оƬ���������_��
2Ƕ��ʽlinux���M늙C��
linux�����е��O�俴�����w���ļ���ͨ�^�ļ�ϵ�y�ӌ��O���M���L����������lmux�Ŀ�ܽY���У��c�O�����P��̎�����Է֞�ɂ��ӴΣ����ļ�ϵ�y�Ӻ��O���ӌӡ��O���ӌ����ξ��w�O��ļ������ļ�ϵ�y�ӄt���Ñ��ṩһ�M�yһ��Ҏ�����Ñ��ӿڡ��@�N�O������������Ժܺõ��������O���o�P�ԡ������Ը������O�ĸ����M�з���ĔUչ�������O�������ϵ�y�ĽY����D2��ʾ��
2.1���M늙C��Ҫ�ӳ����OӋ
���ȶ��xgpio�ڣ���ʼ��Ӳ����Ȼ�����ch��ֵ�x��ͬ��늙C�����@���҂�ʹ��3��늙C��ch��ֵ���x�����3��ͨ���Ќ�����gpio����
a3972���������Ķ����Ʋ�ͬ��늙C����i��18 >o��19��ѭ�h�����clock_ pinģ�Mclk�r犵�һ�����ڣ�����get_ bit�@ȡ�����ĵ�iλ���x
��data_ pin����f�oa3972�����w�������£�
|