����svpwm������{�����Ƶğoλ�Â����� bldcm�����ӿ���
�Ϲ₥����䣬�ܺ�
����܊���̴�W늚��ϵ����h430033��
ժҪ��ᘌ��oλ�Â����������şoˢֱ��늙C�����ӿ��ƣ������˶�����ͨ������׃����늉����gʸ��pwm���ƣ�����˾��ж�����ͨ��svpwm���ƺ�����{�����Ƶğoλ�Â�����bldcm�����ӿ��ƣ���������{�����Ʋ��Ã��cʽ���^�����ơ�ԓ���ӿ��Ʒ�����������Ч�������������С�����Ҹ�����bldcm�_�h�������ܡ�ͨ�^������^�������ڱ���������ͨbldcm����{�����ƵĻ��A�ϣ�svpwm���ӿ��Ʊ����l���ӿ������ܸ��á�
�P�I�~���oˢֱ��늙C��늉����gʸ������������ӣ�����
�ЈD���̖��tm36+li �īI��־�a��a ���¾�̖��1001-6848(2010)04-0045-04
o����
������λ�Â����������β����şoˢֱ��늙C���f����������Dz�����ʲô���}�ġ������ڿ���늄��M��λ�Ùz�y�ğoλ�Â������oˢֱ��늙C�����Ӂ��f�������oֹ�Լ����ٕr���y�z�y����늄���̖���Ķ�ʹ��늙C����������ӳ�����Ҫ���}��Ŀǰһ����õķ�����������ͬ��ʽ���ӣ�ʹ늙C���ٵ���늄ݿ��Ա��z�y�����ٶȣ�Ȼ�������÷�늄ݙz�y���ГQ���Կ�ͬ����ʽ��
�īI[1-6]��������ʽ���ӷ����������Ƚo����ă��ඨ���@�Mͨ�һ���r�g���D�ӌ�����λ��������λ���ϣ�Ȼ���x���o���l����u���ߵēQ����̖��늙C�������٣���늙C���_һ���D�ٺ��ГQ����ͬ���\�У����oλ�Â�������ʽ���īI[7]�����A��λ��ʽ���ӣ�ʡȥ��׃�l�����^�̣����ӷ�ʽ���^���Σ������ГQ�r�gҪ�������늙C�D�ӑT����ͬ��һ��ؓ�d���ӕr����횺����{���·�������īI[8]���������l����ͬ�����ӷ�ʽ���OӋ��һ����������ʎ���ͭh�η������������·��ʹ�ÿ����·���s�����īI[9]�\��dsp�ȵ��¼���������ܛ�����������F���l�������ӣ�������������O�䣬������Ӳ���·���īI[10]����˿���������c�������������������ӷ����������ڲ�ͬ��ؓ�d�в�ͬ������������ԓ�k���m���ڹ̶�ؓ�d�Ĉ��ϡ��īI[ 11-12]ͨ�^���غ��l�M�ГQ�࣬ͬ�r����늄��^���c�M�Йz�y�����B�mn�Ιz�y���_·��ķ�늄��^���c���ГQ���Կؠ�B���īI[13]�\��dspоƬ����ܛ���㷨���F���غ��l�����_�h���ӿ��ơ��īI[ 14-15]�����˶̕r�z�y�}�_�D�Ӷ�λ���ӷ������D�Ӷ�λ������ͬ������ʽ���ӷ����������D�������w�����Fо�Ķ��Ӿ�Ȧ�������Ż�ȥ�����ã�ʹ��Ȧ늸С�pС�������D�ӵ�λ�ò�ͬ�����Ӿ�Ȧ늸еĴ�С��ͬ�����������@�Mʩ�ӹ̶��}���}������늙C�D�ٵ���ʎ���ҳ̶��S���D�ӑT������ʩ늉���С����ͬ�����⣬���ڟoˢֱ��늙C�Ķ��Ӵń��ڿ��g�ϱ��F�鲽�Mʽ׃������˶��Ӵń��c�D��d�S�ĊA���Dz���׃���ģ�����������ؓ���棬���������^����һ�����������^�̣������������Ҳ�ܴ������^�̅����������y������һ��ؓ�d׃�����������{������������ʽ���Ӻ����l�������ӣ�����ͨ�^��u�{��늉����g�ӿ����������������]�еõ�ֱ����Ч���ƣ��������ܲ
���Q�����^�̵���ʎ�c���ӆ��}����Ч������������������������ܣ����������^�̵IJ��_���Ԇ��}���ɲ���늉����gʸ����������׃����늙C����һ�����w��ͨ�^������׃����6�����ʹܵ�ͨ�࣬���܉�E����늉�ʸ�������Ƅӣ�ʹ늙C���Ӵ��ʸ���ӑB��ۙ�o��܉�E��ͨ�^�xȡ���m��늉�ʸ�������ƶ��Ӵ�朵ķ�ֵ�ؽ����ڈA�ε�܉�E���D�����C늙C�����^�̵�ƽ���Ϳɿ��������D���Ǹ�ۙ���Ӵ�朵ģ�����ͨ�^���ƶ��Ӵ�����D���ٶȣ���ɿ���늙C�D�١���һ���棬ֻҪ�{��늉����g��ʸ�����Õr�g��Ҳ����׃��늉����gʸ����ֵ���͌�����������F���{�����ƣ�����Ч���Ɵoλ�Â������µ��_�h�������ܡ�
1����svpwm������{�����Ƶ�bldcm����
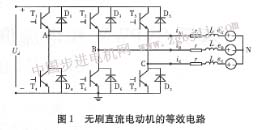
����Ԫˢֱ��늄әC�Ě�϶�ň�����늄ӄ��Լ�����Ƿ����ҵģ�����ֱ�����S����׃�Q�Ѳ�����Ч�ķ������������O�����@�M��ȫ���Q������늙C�еĴŜ��͜u���p�ģ���Ӌ늘з�������϶��ͨ��Ӱ푡��ɵ������oˢֱ��늄әC�ĵ�Ч�·��D1��ʾ��
|