Ƕ��ʽоƬ��atpϵ�y�еđ���
���d�t���x���Z����
���ɶ�������W���̼��g�WԺ���ɶ�614007��
ժҪ��������߽����x�ĸ�ۙ�����@�����(atp)�ľ��ȣ�Խ��Խ��ď��s���r�㷨�����õ���늽����x��atpϵ�y�У����Ҫ���ŷ��������܉�����̵ĕr�g����ɴ������\�㣬�����ŷ����������\����������˸��ߵ�Ҫ��Ŀǰ�Ľ����x�ŷ�ϵ�y�����ڵװ�pc104�ϯB�Ӷ�N���ܰ忨����ɲ��@��ۙ���΄գ���������ϵ�y�OӋ����Ƕ��ʽоƬ����ĵ��ŷ�ϵ�y�������˿ɿ��ԣ�����˾��Ⱥ�푑��ٶȡ�
�P�I�~��Ƕ��ʽ�����ȣ�atpϵ�y
�ЈD���̖��tp272 �īI��־�a��a ���¾�̖��1001-6848��2010��04-0080-03
1�Ҽ��Y��
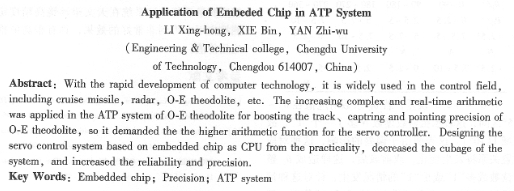
Ŀǰ��늽����x���ŷ�ϵ�y���ÈD1�vʾ��pc104����ϵ�y������ͨ�^��������Ӌ��C���w��Ŀ����ɲ��@��ۙ�ȹ��ܣ���Ҫ�M�Ɍ��H���õĸ�ۙ�ŷ�ϵ�y߀��Ҫ�B�Ӷ��K�忨�����H������ϵ�y�w�e�������˿ɿ��ԣ�����������y�����һ��M���F��
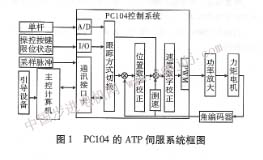
�b������ԭ���˸���pc104�ıˣ��OӋ����tms320f2812��cpu���ŷ�ϵ�y��������һ���늙C���ƶ��OӋ��оƬ�����H�����\���ٶȿ�����c�����Ҽ������S����Ƭ�����O���܉�M���ۙϵ�y�Ķ��Ҫ��ԓ��������Ҫ��늙C��dsp����̎�����������D�Q�·�������·��һЩ�o���·�M�ɣ���D2��ʾ��
1)dsp: tms320f/c281x����ti��˾dsp������zxxxϵ�е��³ɆT����tms320f/c2xxxƽ�_�µ�һ�N���cdspоƬ������늙C�Ĕ��ֻ���
Ƕ��ʽоƬ��atpϵ�y�еđ������d�t�����Ʒ�����еͳɱ������ġ������ܵ����c�����Ҍ��N���M�����O���ɵ�ԓоƬ�ȣ��γ��������Ć�оƬ��������
2)ace�ӿڣ�dspͨ�^16c554�xȡ����ϵ�y�l�́��Ŀ�����������r���ͮ�ǰ�Ŀ���ϵ�y�Ġ�B��Ϣ��16c554�Ǽ��ɮ���ͨ��Ԫ������fifoģʽ��ݔ�ͽ���ǰ���������_��16�ֹ����������p����cpu���Д�����������4��������16c550��ÿ��ͨ�����F���кͲ��ЃɷN�B�ӷ�ʽ���D�Q�����пɾ��̵Ĵ��нӿ����ԡ�
3)�����D�Q�·��tms320f2812��16·pwmݔ���ڹ�늙Cʹ�ã�ͨ�^����pwm����ռ�ձȁ���׃����늙C�ɶ˵�늉����Ķ���׃늙C���D�١�����dsp�l����pwm�����ʲ������Ӵ���늙C����Ҫ���^igbt�M�й����D�Q���OӋ�Б����ˌ�icbt�c��оƬ��Y�ϵ�������оƬ(ipm)pm100dsa120�������ɂ�igbt�c�����Ӳ��ּ��ɵ�һ��ttl�ƽ���Ɍ��F�����ӣ����Ҿ��������ĸ��x�����o���ܣ����^�����^�����o�ȡ�
2ܛ������
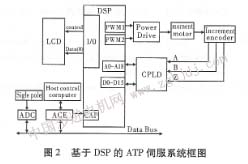
������߿���ϵ�y�ĸ�ۙ���ȣ���Ӳ���·���A�ϴ������·���ٶȻ�·��λ�û�·����������·�{��������ɢ�����M��ܛ�����̣��㷨ģ�Kܛ��������D3��ʾ��
3�ŷ�У��
���^igbt��pwm����늙C�Ķ����Ӹ�ۙ���D�ӣ�늙C�������Ƶģ����еęC늕r�g����l�����A�S푑����y��[2]��ģ�͞飨��ij��̖�����x�ĸ����C��������������****���ٶ�50��****�Ǽ��ٶ�30���\��Ŀ�˵ĸ�ۙ����У���������¹�ʽ�ɵó���Ч�����\��Ŀ�˵ĺ�����
3.1�ͺ�У��
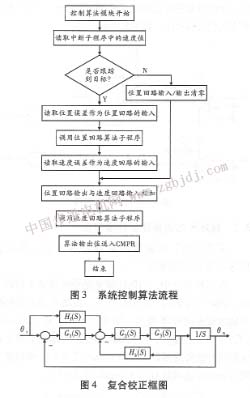
�ͺϿ��ƾ�����ϵ�y�]�h������һ���_�h����֧·���Á��ṩݔ����̖��һ�A������ʹϵ�y�ğo�o�����ߣ�ϵ�y�Ŀ���푑�������ߡ��ͺ�У����D��D4��ʾ��
�D4��g��(s)��λ��У��������g2(s)���ٶ�У��������g3(s)����ƌ�����f������hf(s)���ٶ�ǰ�����f�����������l�ʽo���c�ٶȽo��ֵ֮�g��׃�Q�Pϵ��g(s)���ٶȷ��������a�������f��������̎λ�÷������λؓ�������ڲɘ��l�ʞ�800ͬ�����ڞ�1 25 m |