����c8051f310��Ƭ�C��ֱ��늙C���r�D�ٱO��ϵ�y�OӋ
�̇��䣬����r��÷����
(����������W�C늹��̌WԺ���M��341000)
ժҪ����Bһ�N����c8051f310��Ƭ�C��ֱ��늙C�D�ٵČ��r�O��ϵ�y�OӋ�����o��ԓϵ�y��Ӳ���·��ܛ���OӋ��ԓϵ�y���нY�����Σ����ܿ��ٔUչ���{���������á��\�пɿ������c�����ԺܺõرO��늙C�Č��r�D�١�
�P�I�~������Ƭ�C��ֱ��늙C�����r�D��
�ЈD���̖��tm381��tp273ʮ1 �īI��־�a��a ���¾�̖��1001-6848(2010)04
0�� ��
���S�ӿ���ϵ�y�У�늙C�D�ٵķ����c����ռ�кܴ�ı��أ����F�ٶȷ����ķ�ʽ�c�ֶΣ���ϵ�y�ķ��B�`��ӑB푑����ܶ�����ʮ����Ҫ��Ӱ푡�����һ���߾��ȵĿ���ϵ�y��
�������ʴ_��늙C�����D�٣����Ը��õ،�늙C�����������������Д�늙C�\�еĮ�����r���M�бO�y����ˣ���늙C�D�ٵĜy���Ƿdz���Ҫ�ġ�
���y����ģ�M�������ٶȷ���������ϵ�y�������ܷǾ��ԡ��ض�׃����Ԫ���ϻ������ص�Ӱ푣����y�M������^�̵Ŀ����Ժ͜ʴ_��Ҫ��������c8051f310ϵ�І�Ƭ�C��������늙C��ģ�M��̖���D�Q���Ԕ�����̖������ʽ������ٌ���ӳ늙C�ٶȵ��}�_��̖�����o��Ƭ�C̎������ͨ�^led���a�܌��r�O��늙C���D��[1]��
l ϵ�y�OӋ
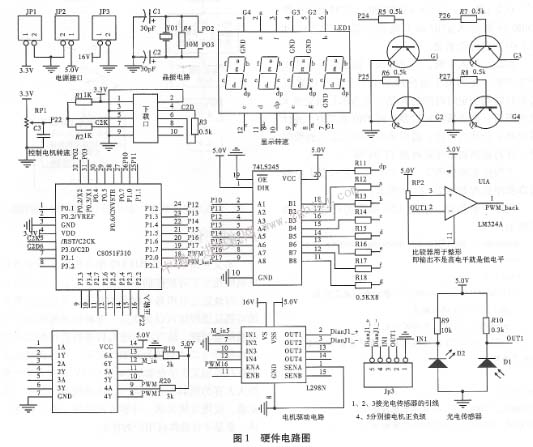
1.1Ӳ���·�OӋ
ԓϵ�y������Ӳ���·�Y����Dl��ʾ��
ԓ�·�Ĺ���ԭ�����£�
ͨ�^�{���λ��������늙C���D�٣���ͨ�^�{���λ��rp��׃ݔ�뵽�˿�p2.2��ģ�M늉�����ͨ�^c8051f310��Ƭ�C�Ȳ���a/d�D�Q�����D�Q��һ��ռ�ձȵ�pwm��̖���Ķ˿�p2.0ݔ����hd74hc04p�M�з��࣬������pwm��̖����������Ȼ����ݔ����늙C��оƬl298������늙C���D�٣�֮�������ù�늂������ʹa�P���ɼ�늙C�D�ӕr�a�����}�_��̖����ԓ�������B�m��ģ�M��̖����Ƭ�C����̎�������ٌ�4�\�ż����·lm324�ӳɱ��^���Ĺ��ܣ�Ȼ���@�M�}�_����ݔ����lm324��2�_����ͨ�^�{���λ��rp2���Ϳ��Եõ�һ�M��Ƭ�C����̎���ġ����ܷ�ӳ늙C�D�ٵķ�����̖pwm_ back���ٌ�pwm_backݔ�뵽�˿�p2.1�������ö��r��0��Ӌ�����ܡ���Ӌ��˿�p2.1�ڲɘ�����t�ȵ��}�_�����������ͨ�^��ʽ(1)�����늙C���D�ٲ�ͨ�^l���a�܌��r���@ʾ������
���O��t�r�g�ȣ����r��0Ӌ���õ�m���}�_�����a�P�DһȦ�a��һ���}�_������������늙C�ǎ��Џ��p���b�õģ��O늙Cÿ�DһȦ���a�P���DyȦ���t늙C���D�ٞ飺
n=60m/xyt��1��
�������OӋ���·���õ�늙C���~��늉���16 v���Ҏ��Џ��p���b�õģ�ԓ늙Cÿ�DһȦ���a�P���D64Ȧ���a�P�DһȦ���a��30���}�_������늙C�Dһ�����a��xy= 1920���}�_���ұ����ԱO��늙C�Ć����D�Ӟ��о�������Ҫ�y��늙C���p���D�ӣ�ֻҪ����׃�����Ӳ���·������ij����OӋ���漴�ɡ�
1.2ܛ���OӋ
ÿ��a/d�D�Q�Y���Ĵ���adcoh��adcol�б���adc�D�Q�Y���ĸ��ֹ��͵��ֹ�����adoustλ��1��ʹ�D�Q����D�Q�����ڼĴ�����adcoh: adcol�������R�ķ�ʽ���档�������چζ˷�ʽ�r�����D�Q��ģ�M늉������飺o-vref 1023/1024������vref=3.3 v��Ȼ���ٌ������ڼĴ���adcoh�еĔ����x�opca��16λӋ���������r���ĸ��ֹ�pcaoh����ͨ�^�������^ģ�K�ĸ��ֹ�pcaocpho���@��һ����ռ�ձ�pwm���������ö��r��l�Ķ��r���܁��a���Д࣬���O���r�r�g��t�������ö��r��0��Ӌ�����܁�Ӌ���ⲿ늙C�a�P�a���ķ���������Ӌ����t�r�g�ȣ����Զ˿�p2.1��pwm-back��̖���}�_��������Ӌ���Y�������ڸ��ֹ�tho�͵��ֹ�tlo�У���Ӌ���}�_�Δ��ķ����飺o~ 65535����
�ڴˣ������Д࣬�����r��l����r����Ƭ�C�a���Д࣬���r��1�����־tf1�����Ԅ���o����ȡ�ӕr�g�鶨�r�r�g��k�����t����Ƭ�C���k���Д����ȥ�xȡ���r��0��tho��tlo����Ӌ��늙C1��犵��D�٣����늙C�D���@ʾ�����a�ܣ��������³�ʼ�����r��tl��to[3]��
|